 |
|
このページでは、2012年8月6日に火星のゲイルクレータに着陸した火星科学研究所宇宙船(MSL)とマーズローバーキュリオシティの“基礎情報”をご紹介しています。NASAは、火星と地球が接近する2年ごとに新しい火星探査衛星を打ち上げてきましたが、前回は開発が間に合わずに打上げが見送られました。したがって、今回の火星ミッションは4年ぶりです。 |
 火星探査ミッションには、大きく分けて、軌道を周って空から探査する“軌道船ミッション”と、地上に降り立って探査する“着陸船ミッション”があります。着陸船ミッションには、また、地域を移動しない固定型ミッションと、ローバー(探査車)型の移動探査ミッションがあります。今回の探査は、キュリオシティローバーによる、移動型探査ミッションです。今回開発されたミッションは、当初、火星科学研究所(MSL:Mars Science Laboratory)と名付けられていました。その後、ローバー(探査車)の名前が公募され、キュリオシティ(curiosity:好奇心)と名付けられました。つまり、「火星科学研究所」が公称、「キュリオシティ」が俗称または一般名です。ただし、今後の活動の主体はキュリオシティローバーになりますので、「火星科学研究所」という呼び名はあまり使われなくなると思います。なお、このところの火星探査の最大の目的は、火星がかって生命を育むのに適した環境にあったか否かを確かめることにあり、その大きな主題が火星の水に関連する調査になっています。ゲイルクレータは、軌道からの調査で、現在もなお水の存在が推測されている、主要な調査候補の一つです。
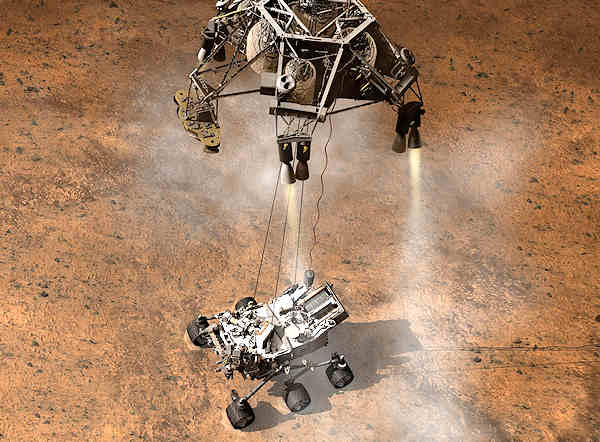
今回のキュリオシティの野心的な科学ゴールには、これまでの火星ローバーミッションとの多くの相違があります。キュリオシティは、火星ローバースピリッツとオポチュニティの科学機器とほぼ同じ大きさの、総重量で15倍の、10の科学器具を運んでいます。例えばレーザー燃焼装置などのツールのいくつかは、火星での初めての検査機です。これまでに探査機が火星に着陸するには、パラシュートを開いて降下する方式(固定式着陸船)と、着陸を保護するためのエアバッグに包まれてバウンドしながら着地する方式(移動式着陸船)が使われてきました。キュリオシティは、その1トンの重量の故に、以前の火星ローバーが用いたようなエアバッグ方式は使えません。火星科学研究所宇宙船の一部は、ロケットエンジンが降下の速度をコントロールして“綱でローバーを降ろす”ロケット動力の降下ステージを試みます(右図参照)。
火星探査ミッションには、大きく分けて、軌道を周って空から探査する“軌道船ミッション”と、地上に降り立って探査する“着陸船ミッション”があります。着陸船ミッションには、また、地域を移動しない固定型ミッションと、ローバー(探査車)型の移動探査ミッションがあります。今回の探査は、キュリオシティローバーによる、移動型探査ミッションです。今回開発されたミッションは、当初、火星科学研究所(MSL:Mars Science Laboratory)と名付けられていました。その後、ローバー(探査車)の名前が公募され、キュリオシティ(curiosity:好奇心)と名付けられました。つまり、「火星科学研究所」が公称、「キュリオシティ」が俗称または一般名です。ただし、今後の活動の主体はキュリオシティローバーになりますので、「火星科学研究所」という呼び名はあまり使われなくなると思います。なお、このところの火星探査の最大の目的は、火星がかって生命を育むのに適した環境にあったか否かを確かめることにあり、その大きな主題が火星の水に関連する調査になっています。ゲイルクレータは、軌道からの調査で、現在もなお水の存在が推測されている、主要な調査候補の一つです。
今回のキュリオシティの野心的な科学ゴールには、これまでの火星ローバーミッションとの多くの相違があります。キュリオシティは、火星ローバースピリッツとオポチュニティの科学機器とほぼ同じ大きさの、総重量で15倍の、10の科学器具を運んでいます。例えばレーザー燃焼装置などのツールのいくつかは、火星での初めての検査機です。これまでに探査機が火星に着陸するには、パラシュートを開いて降下する方式(固定式着陸船)と、着陸を保護するためのエアバッグに包まれてバウンドしながら着地する方式(移動式着陸船)が使われてきました。キュリオシティは、その1トンの重量の故に、以前の火星ローバーが用いたようなエアバッグ方式は使えません。火星科学研究所宇宙船の一部は、ロケットエンジンが降下の速度をコントロールして“綱でローバーを降ろす”ロケット動力の降下ステージを試みます(右図参照)。 この三種の火星探査ローバーは、NASAのジェット推進研究所の火星ヤードに置かれたテスト機である。左手前は、1997年に火星に着陸した、移動体として地球外の天体で初めて活躍した火星探査ローバー、ソジャナー(Sojourner)である。その大きさは電子レンジほど、その視界は猫の目の高さと言われた。左上は2004年1月に相次いで火星に着陸した、マーズローバースピリッツとオポチュニティのテストローバーである。スピリッツとオポチュニティは、火星を移動しつつ、間接的ながら、過去の水に関する証拠を数多く発見してきた。スピリッツは、既に寿命が尽き交信が途絶えているが、オポチュニティは今なお火星で活躍している。右は、火星探査ローバー キュリオシティのテストローバーである。この図の、ソジャナーのスペア、マリー・キューリーは長さ65センチメートル、スピリッツとオポチュニティは 1.6 メートル、キュリオシティは3メートル(小型バスの大きさ)である。なお、ソジャナーは親である着陸船マーズパスファインダーの子機として働き、それ以外は独立した単体として設計されている。
この三種の火星探査ローバーは、NASAのジェット推進研究所の火星ヤードに置かれたテスト機である。左手前は、1997年に火星に着陸した、移動体として地球外の天体で初めて活躍した火星探査ローバー、ソジャナー(Sojourner)である。その大きさは電子レンジほど、その視界は猫の目の高さと言われた。左上は2004年1月に相次いで火星に着陸した、マーズローバースピリッツとオポチュニティのテストローバーである。スピリッツとオポチュニティは、火星を移動しつつ、間接的ながら、過去の水に関する証拠を数多く発見してきた。スピリッツは、既に寿命が尽き交信が途絶えているが、オポチュニティは今なお火星で活躍している。右は、火星探査ローバー キュリオシティのテストローバーである。この図の、ソジャナーのスペア、マリー・キューリーは長さ65センチメートル、スピリッツとオポチュニティは 1.6 メートル、キュリオシティは3メートル(小型バスの大きさ)である。なお、ソジャナーは親である着陸船マーズパスファインダーの子機として働き、それ以外は独立した単体として設計されている。
 次期火星ローバーの着陸地として、60を超えるサイトが考慮された。この火星のマップは、火星科学研究所のために提案された60以上の着陸サイトの全てを赤い点で示している。四つの最終的な候補サイトを青い点で示している。5年を超える150人以上の科学者達による議論が、最終的な候補サイトとして四か所の選択に結びついた。
次期火星ローバーの着陸地として、60を超えるサイトが考慮された。この火星のマップは、火星科学研究所のために提案された60以上の着陸サイトの全てを赤い点で示している。四つの最終的な候補サイトを青い点で示している。5年を超える150人以上の科学者達による議論が、最終的な候補サイトとして四か所の選択に結びついた。 NASAは、火星にキュリオシティという名の車サイズのローバーを運ぶ、火星科学研究所の11月26日の打上で、歴史的な航海を開始した。ケープカナベラル空軍基地からのアトラスⅤロケットでの離陸は、東部標準時午前10時2分(日本時間11月27日午前0時2分)であった。アトラスⅤは最初に地球軌道に宇宙船を高く打ち上げ、船の上段の2回目の燃焼が、地球軌道から火星までの5億 6700 万キロメートルの旅に押し上げた。打上後の交信が確認され宇宙船は健康である。
NASAは、火星にキュリオシティという名の車サイズのローバーを運ぶ、火星科学研究所の11月26日の打上で、歴史的な航海を開始した。ケープカナベラル空軍基地からのアトラスⅤロケットでの離陸は、東部標準時午前10時2分(日本時間11月27日午前0時2分)であった。アトラスⅤは最初に地球軌道に宇宙船を高く打ち上げ、船の上段の2回目の燃焼が、地球軌道から火星までの5億 6700 万キロメートルの旅に押し上げた。打上後の交信が確認され宇宙船は健康である。 この記事は、宇宙船が火星に向かって飛行中の、2012年6月15日に発表された、「ローバーチーム、本来の科学サイトに近い着陸を目指す」からとっています。
NASAは、8月に赤い惑星に着陸する、最も先進的な火星ローバーキュリオシティの目標を以前の計画より狭めた。この車サイズのローバーは、科学活動のためのその最終的な目的地の近くに、しかしまた、更に着陸の危険をもたらす山の斜面の麓近くに着くだろう。キュリオシティローバーを運んでいる火星科学研究所宇宙船の精密な着陸技術に関する信頼の増加の故に、着陸計画は調整することが可能になるだろう。宇宙船は、ゲイルクレータの中心のシャープ山に衝突することなく、近くを狙うことができるだろう。この山にある岩の層は、ローバーによる調査の第一の場所である。キュリオシティは、東部夏時間8月6日午前1時31分(日本時間8月6日午後2時31分)に着陸する予定である。チェックアウトの後、キュリオシティは、着陸地周辺が微生物に好意的な環境を提供したかどうかの、2年間の調査を開始するだろう。
この記事は、宇宙船が火星に向かって飛行中の、2012年6月15日に発表された、「ローバーチーム、本来の科学サイトに近い着陸を目指す」からとっています。
NASAは、8月に赤い惑星に着陸する、最も先進的な火星ローバーキュリオシティの目標を以前の計画より狭めた。この車サイズのローバーは、科学活動のためのその最終的な目的地の近くに、しかしまた、更に着陸の危険をもたらす山の斜面の麓近くに着くだろう。キュリオシティローバーを運んでいる火星科学研究所宇宙船の精密な着陸技術に関する信頼の増加の故に、着陸計画は調整することが可能になるだろう。宇宙船は、ゲイルクレータの中心のシャープ山に衝突することなく、近くを狙うことができるだろう。この山にある岩の層は、ローバーによる調査の第一の場所である。キュリオシティは、東部夏時間8月6日午前1時31分(日本時間8月6日午後2時31分)に着陸する予定である。チェックアウトの後、キュリオシティは、着陸地周辺が微生物に好意的な環境を提供したかどうかの、2年間の調査を開始するだろう。
 最初にイメージをクリックして、「キュリオシティ、恐怖の7分」をご覧ください。
最初にイメージをクリックして、「キュリオシティ、恐怖の7分」をご覧ください。
| 事 象(左上から) | 高 度(KM) | 速 度(KM/SEC) | 時刻(軌道入基準) |
|---|---|---|---|
| 飛行段階分離 | 軌道入 10 分前 | ||
| バランス装置分離 | 同 8 分前 | ||
| 軌道入インターフェース | ~125 KM | 5,900 | 0秒 |
| 熱最大 | |||
| 減速最大 | |||
| 超音速操作 | |||
| パラシュート展開 | 11 KM | 405 M/s | 254 秒 |
| 熱シールド分離 | 8 KM | 125 M/s | 278 秒 |
| レーダーデータ収集 | |||
| バックシェル分離 | 1.6 KM | 80 M/s | 364 秒 |
| 動力降下 | |||
| スカイクレーン降下 | |||
| (ローバー分離) | 20 M | 0.75 M/s | 400 |
| (ローバー展開) | |||
| (着陸) | 0 | 0 | 軌道入から 416 秒 |
| ローバー着陸後分離 |
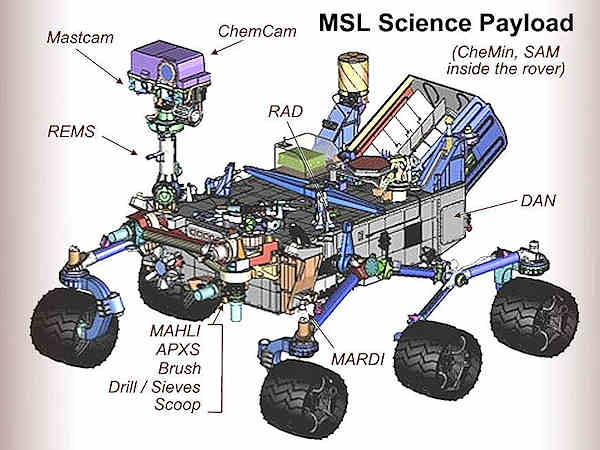 この火星科学研究所ミッションのローバー、キュリオシティは、自動車サイズのローバーの、科学装置その他のツールの位置を示している。左上から時計回りに:
この火星科学研究所ミッションのローバー、キュリオシティは、自動車サイズのローバーの、科学装置その他のツールの位置を示している。左上から時計回りに: NASAのキュリオシティローバーのロボットアームの終端の、火星虫眼鏡画像(MAHLI:Mars Hand Lens Imager)カメラは、アームの肩のジョイントに取り付けられている較正目標(calibration target)を使う。このイメージは、ローバーの目標の場所を示すために、ローバーと較正目標のクローズアップを結合している。この MAHLI 較正目標には、ペニー(penny:お金)、カラーチップ(color chips)、メートル標準バー(metric standardized bar graphic)、深さ較正のための階段状のパターン(ペニーの下)を含んでいる。キュリオシティは、 MAHLI と九つの他の科学装置によって、そのエリアが微生物の生命にとって好都合な環境状況を提供したかどうかを調査する。
NASAのキュリオシティローバーのロボットアームの終端の、火星虫眼鏡画像(MAHLI:Mars Hand Lens Imager)カメラは、アームの肩のジョイントに取り付けられている較正目標(calibration target)を使う。このイメージは、ローバーの目標の場所を示すために、ローバーと較正目標のクローズアップを結合している。この MAHLI 較正目標には、ペニー(penny:お金)、カラーチップ(color chips)、メートル標準バー(metric standardized bar graphic)、深さ較正のための階段状のパターン(ペニーの下)を含んでいる。キュリオシティは、 MAHLI と九つの他の科学装置によって、そのエリアが微生物の生命にとって好都合な環境状況を提供したかどうかを調査する。
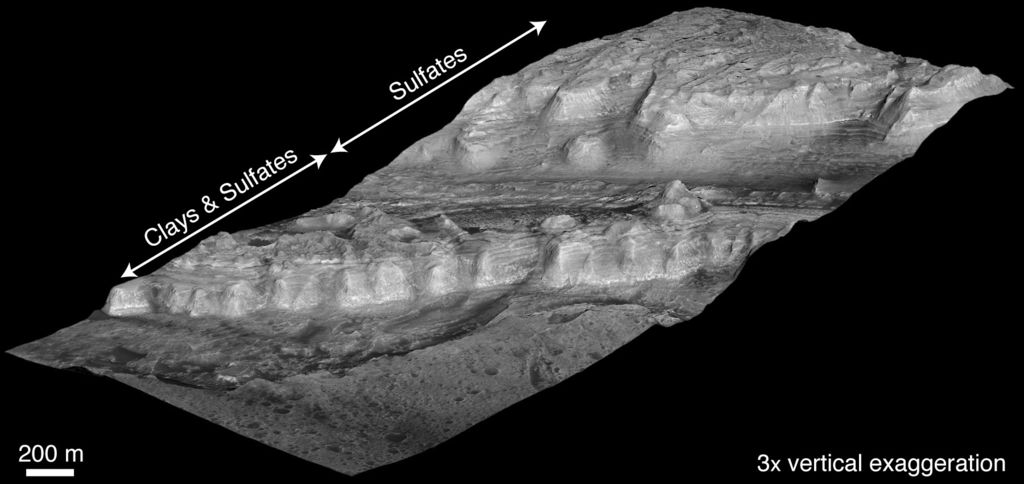
 NASAのマーズオデッセイ軌道船の熱放射画像処理システムカメラからのこの鋭い視界は、火星の赤道近くの、幅154キロメートルのゲイルクレータに中心を置いている。ゲイルの中の印象的な層をつくった山が、約5キロメートル、クレータフロアにそびえている。そのベース近くの層と構造は、古代に水によって運ばれた堆積物によってつくられたと考えられている。実際に、山の下部のクレータの北側の近くの場所は、火星科学研究所ミッションの目標に選ばれた。このミッションは、2012年8月に、火星への惑星地球からの次の客を着陸させ、車サイズのキュリオシティローバーを、浮かばせ、ロケットパワーのスカイクレーンで火星の地表に降ろすだろう。キュリオシティの科学装置は、かつて、ゲイルが、微生物の生命を支え、赤い惑星に生命が存在したかどうかについて、手掛かりを保持する良好な環境条件にあったかどうかを発見することを目的としている。
NASAのマーズオデッセイ軌道船の熱放射画像処理システムカメラからのこの鋭い視界は、火星の赤道近くの、幅154キロメートルのゲイルクレータに中心を置いている。ゲイルの中の印象的な層をつくった山が、約5キロメートル、クレータフロアにそびえている。そのベース近くの層と構造は、古代に水によって運ばれた堆積物によってつくられたと考えられている。実際に、山の下部のクレータの北側の近くの場所は、火星科学研究所ミッションの目標に選ばれた。このミッションは、2012年8月に、火星への惑星地球からの次の客を着陸させ、車サイズのキュリオシティローバーを、浮かばせ、ロケットパワーのスカイクレーンで火星の地表に降ろすだろう。キュリオシティの科学装置は、かつて、ゲイルが、微生物の生命を支え、赤い惑星に生命が存在したかどうかについて、手掛かりを保持する良好な環境条件にあったかどうかを発見することを目的としている。
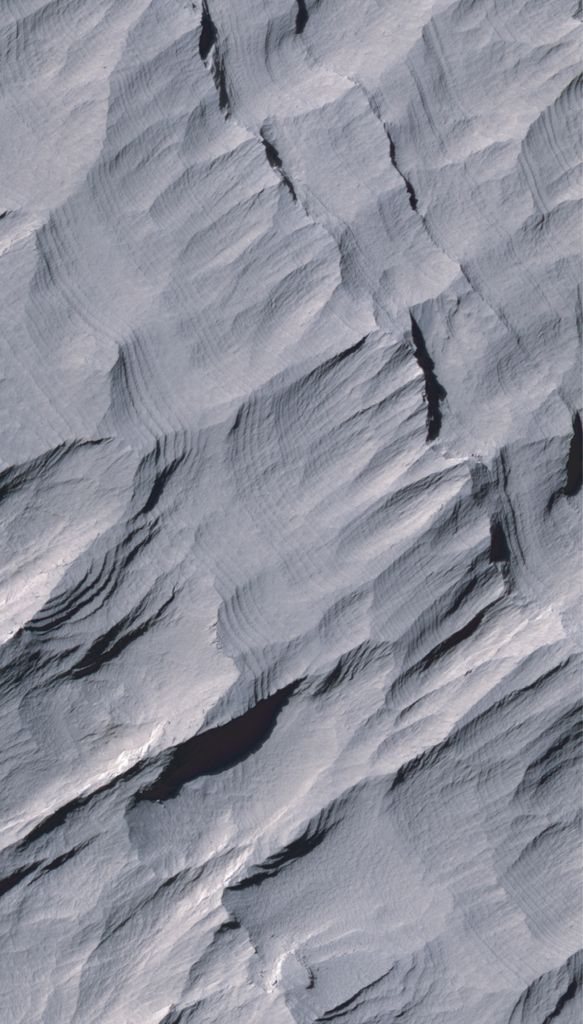
| 層をなしたマウンドの視界 |
|---|
 |
| マウンドの下の層 |
|---|
 |
| マウンドの上の層 |
|---|
 |
 TOP
TOP
 NEXT
NEXT