 |
|

このページでは2004年1月に火星のメリディアニ平原に着陸したマーズローバーオポチュニティ(火星探査ローバーB)の火星での活動をご紹介しています。

May 21, 2015



April 30, 2015
 NASAの火星探査ローバーオポチュニティは、ローバーの前面危険回避カメラからのこのイメージで、「アテネ(Athens)」と呼ばれる明るいトーンの岩のターゲットを調査するためにそのロボットアームを伸ばした。カメラは火星日 3,970 日(3.25.2015)にこのイメージを記録した。このカメラはローバーの低部に取り付けられており、広角レンズを持っている。
NASAの火星探査ローバーオポチュニティは、ローバーの前面危険回避カメラからのこのイメージで、「アテネ(Athens)」と呼ばれる明るいトーンの岩のターゲットを調査するためにそのロボットアームを伸ばした。カメラは火星日 3,970 日(3.25.2015)にこのイメージを記録した。このカメラはローバーの低部に取り付けられており、広角レンズを持っている。
Mar 30, 2015
 このイラストレーションは、2004年1月のイーグルクレータへの着陸後11年2ヵ月のマラソン競技に相当する距離、NASAの火星探査ローバーオポチュニティがドライブしたルートに沿って、いくつかのハイライトを描いている。このマップでは北は左である。
このイラストレーションは、2004年1月のイーグルクレータへの着陸後11年2ヵ月のマラソン競技に相当する距離、NASAの火星探査ローバーオポチュニティがドライブしたルートに沿って、いくつかのハイライトを描いている。このマップでは北は左である。
March 24, 2015
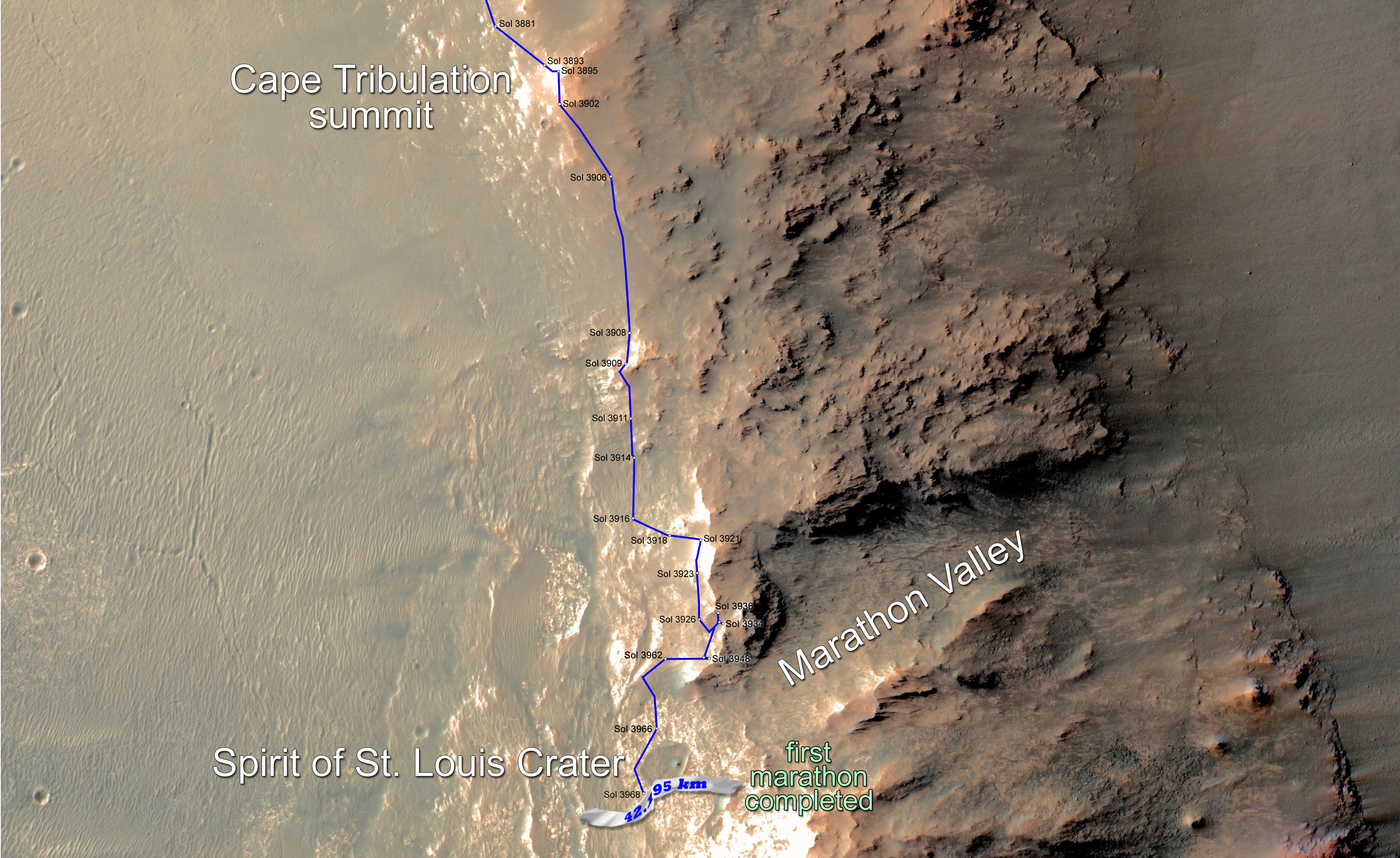 火星への着陸の11年2ヵ月後に、NASAの火星探査ローバーオポチュニティの総ドライブ距離は 42.195 キロメートルのマラソン競技の長さを超えた。このマップは、2014年12月下旬から、火星日 3,968 日(2015, 3, 24)にマラソン距離を超えるまでの、オポチュニティがドライブした南への経路を示している。最近のドライブは、エンデバークレータの西の縁の「マラソン谷(Marathon Valley)」と呼ばれる科学目的地近くに宇宙船を持ってきた。ローバーチームは、マラソン谷の中に入る前に、「セントルイスクレータのスピリッツ(Spirit of St. Louis Crater)」を調査するためにオポチュニティの機器を使っている。オポチュニティは、2015年12月24日に、マップのトップ近くの火星日 3,881 日の位置に着いた。ここに示されているローバーの横断経路は、NASAの火星偵察軌道船(MRO)の高解像度画像科学実験(HiRISE)カメラからのイメージに重ねられている。
火星への着陸の11年2ヵ月後に、NASAの火星探査ローバーオポチュニティの総ドライブ距離は 42.195 キロメートルのマラソン競技の長さを超えた。このマップは、2014年12月下旬から、火星日 3,968 日(2015, 3, 24)にマラソン距離を超えるまでの、オポチュニティがドライブした南への経路を示している。最近のドライブは、エンデバークレータの西の縁の「マラソン谷(Marathon Valley)」と呼ばれる科学目的地近くに宇宙船を持ってきた。ローバーチームは、マラソン谷の中に入る前に、「セントルイスクレータのスピリッツ(Spirit of St. Louis Crater)」を調査するためにオポチュニティの機器を使っている。オポチュニティは、2015年12月24日に、マップのトップ近くの火星日 3,881 日の位置に着いた。ここに示されているローバーの横断経路は、NASAの火星偵察軌道船(MRO)の高解像度画像科学実験(HiRISE)カメラからのイメージに重ねられている。
March 24, 2015


March 24, 2015
 2004年1月から火星で働いてきたNASAの火星探査ローバーオポチュニティは、火星日 3,968 日(March 24, 2015)のドライブでマラソン距離を通過した。火星日 3,968 日の 46.5 メートルのドライブは、オポチュニティの総路程を 42.198 キロメートルにした。オリンピックのマラソン距離は 42.195 キロメートルである。このイメージの金色の線は、左上のイーグルクレータ内部の着陸地点から、火星日 3,968 日のその場所までの、オポチュニティのドライブルートを示している。このミッションでは、2011年8月からエンデバークレータの西の縁で調査してきた。このクレータは直径約22キロメートルである。この図に表されたエリアは、全て火星の赤道のメリディアニ・プラナム領域の中にあり、以前の軌道からの鉱物の赤鉄鉱の検出の故にオポチュニティの着陸エリアに選ばれた。北は上である。このマップのベースイメージは、NASAの火星偵察軌道船(MRO)でとられたイメージの合成である。
2004年1月から火星で働いてきたNASAの火星探査ローバーオポチュニティは、火星日 3,968 日(March 24, 2015)のドライブでマラソン距離を通過した。火星日 3,968 日の 46.5 メートルのドライブは、オポチュニティの総路程を 42.198 キロメートルにした。オリンピックのマラソン距離は 42.195 キロメートルである。このイメージの金色の線は、左上のイーグルクレータ内部の着陸地点から、火星日 3,968 日のその場所までの、オポチュニティのドライブルートを示している。このミッションでは、2011年8月からエンデバークレータの西の縁で調査してきた。このクレータは直径約22キロメートルである。この図に表されたエリアは、全て火星の赤道のメリディアニ・プラナム領域の中にあり、以前の軌道からの鉱物の赤鉄鉱の検出の故にオポチュニティの着陸エリアに選ばれた。北は上である。このマップのベースイメージは、NASAの火星偵察軌道船(MRO)でとられたイメージの合成である。
Mar 24, 2015
 このマップは、NASAの火星探査ローバーオポチュニティが、マラソン競走に等しいドライブ距離に達する方向へ向かって進捗を更新している。それは、その距離を凌ぐであろうところと比較した、2015年3月23日のローバーの位置を示す。北は上である。青の横断ラインの南端は、火星日 3,966 日のドライブの完了後の2015年3月31日のローバーの場所を指している。火星日 3,966 日には約54メートルをカバーした。比較のために こちら のマップは、オポチュニティの2015年2月10日現在の場所を示している。オポチュニティは、火星日 3,966 日の場所で、 42.195 キロメートルの公式オリンピックのマラソン競技距離を凌ぐ43メートル内にある。このベースマップは、NASAの火星偵察軌道船の高解像度画像科学実験装置(HiRISE)カメラからのイメージである。
このマップは、NASAの火星探査ローバーオポチュニティが、マラソン競走に等しいドライブ距離に達する方向へ向かって進捗を更新している。それは、その距離を凌ぐであろうところと比較した、2015年3月23日のローバーの位置を示す。北は上である。青の横断ラインの南端は、火星日 3,966 日のドライブの完了後の2015年3月31日のローバーの場所を指している。火星日 3,966 日には約54メートルをカバーした。比較のために こちら のマップは、オポチュニティの2015年2月10日現在の場所を示している。オポチュニティは、火星日 3,966 日の場所で、 42.195 キロメートルの公式オリンピックのマラソン競技距離を凌ぐ43メートル内にある。このベースマップは、NASAの火星偵察軌道船の高解像度画像科学実験装置(HiRISE)カメラからのイメージである。
Mar 23, 2015



Mar 23, 2015
 このイメージの中央近くの平坦な面の岩は、2015年3月の初めの、NASAの火星探査ローバーオポチュニティによる接触調査のターゲットである。この視界は、2015年3月3日(火星日 3,948 日)の、ローバーの前部危険回避カメラからである。このカメラはローバーの低部に取り付けられており、広角レンズを持っている。この場面には、オポチュニティのロボットアームの終端のツールタレットの影を含んでいる。この岩には、ルイスとクラーク探検の操舵手にちなんだ「チャールズフロイド軍曹(Sergeant Charles Floyd)」と呼ばれるターゲットを含んでいる。
このイメージの中央近くの平坦な面の岩は、2015年3月の初めの、NASAの火星探査ローバーオポチュニティによる接触調査のターゲットである。この視界は、2015年3月3日(火星日 3,948 日)の、ローバーの前部危険回避カメラからである。このカメラはローバーの低部に取り付けられており、広角レンズを持っている。この場面には、オポチュニティのロボットアームの終端のツールタレットの影を含んでいる。この岩には、ルイスとクラーク探検の操舵手にちなんだ「チャールズフロイド軍曹(Sergeant Charles Floyd)」と呼ばれるターゲットを含んでいる。
Mar 05, 2015
 このマップは、 NASAの火星探査ローバーオポチュニティが、マラソン競技に等しいドライブ距離への到達に向かう中でつくられた。これは2015年3月5日のローバーの位置を示している。北は上である。青の横断線の南端は、火星日 3,948 日(2015年3月3日)のドライブ完成後のローバーの位置を印している。比較として前項の記事は2015年2月10日現在のオポチュニティの場所を示している。火星日 3,948 日の場所では、オポチュニティは、 42.195 キロメートルの公式オリンピックのマラソン競技の距離を凌ぐ前 128 メートル内にある。ローバーチームがマラソン谷に向かう経路を選ぶのでローバーのルートはジグザグに進むかもしれない。したがって、マラソン距離に達するであろう場所については不確実である。このベースマップは、NASAの火星偵察軌道船(MRO)の高解像度画像科学実験(HiRISE)カメラからのイメージである。
このマップは、 NASAの火星探査ローバーオポチュニティが、マラソン競技に等しいドライブ距離への到達に向かう中でつくられた。これは2015年3月5日のローバーの位置を示している。北は上である。青の横断線の南端は、火星日 3,948 日(2015年3月3日)のドライブ完成後のローバーの位置を印している。比較として前項の記事は2015年2月10日現在のオポチュニティの場所を示している。火星日 3,948 日の場所では、オポチュニティは、 42.195 キロメートルの公式オリンピックのマラソン競技の距離を凌ぐ前 128 メートル内にある。ローバーチームがマラソン谷に向かう経路を選ぶのでローバーのルートはジグザグに進むかもしれない。したがって、マラソン距離に達するであろう場所については不確実である。このベースマップは、NASAの火星偵察軌道船(MRO)の高解像度画像科学実験(HiRISE)カメラからのイメージである。
Mar 05, 2015
 2015年2月、NASAの火星探査ローバーオポチュニティは、マラソン競走に等しい火星での累積的なドライブ距離に近づいている。このマップはその距離を超えるであろうローバーの相対的な位置を示している。このマップでは2015年2月10日現在のローバーの位置を示している。ローバーは、2014年12月下旬以降、「マラソン谷(Marathon Valley)」科学目的地に向かっていた。オポチュニティはマラソンを完成する約200メートル以内にある。緑の帯は公式のオリンピックのマラソン競走距離 42.195 キロメートルに達することができる場所を示している。ローバーのルートは、ローバーチームがマラソン谷に向かう経路を選択するのでジグザグに進むかもしれない。したがって、マラソン距離を通過するだろう場所は不確実である。このイメージは北が上である。青い線の南端は、火星日3926日(2015年2月9日)のドライブの後のローバーの位置を示す。ローバーチームは、ローバーがマラソン谷に入る前に、「セントルイスクレータのスピリッツ(Spirit of St. Louis Crater)」の近くまたはその中にオポチュニティをドライブさせる予定である。このエリアは全てエンデバークレータの西の縁の一部である。オポチュニティは、火星日3881日(2015年12月24日)に、マップのトップ近くに着いた。
2015年2月、NASAの火星探査ローバーオポチュニティは、マラソン競走に等しい火星での累積的なドライブ距離に近づいている。このマップはその距離を超えるであろうローバーの相対的な位置を示している。このマップでは2015年2月10日現在のローバーの位置を示している。ローバーは、2014年12月下旬以降、「マラソン谷(Marathon Valley)」科学目的地に向かっていた。オポチュニティはマラソンを完成する約200メートル以内にある。緑の帯は公式のオリンピックのマラソン競走距離 42.195 キロメートルに達することができる場所を示している。ローバーのルートは、ローバーチームがマラソン谷に向かう経路を選択するのでジグザグに進むかもしれない。したがって、マラソン距離を通過するだろう場所は不確実である。このイメージは北が上である。青い線の南端は、火星日3926日(2015年2月9日)のドライブの後のローバーの位置を示す。ローバーチームは、ローバーがマラソン谷に入る前に、「セントルイスクレータのスピリッツ(Spirit of St. Louis Crater)」の近くまたはその中にオポチュニティをドライブさせる予定である。このエリアは全てエンデバークレータの西の縁の一部である。オポチュニティは、火星日3881日(2015年12月24日)に、マップのトップ近くに着いた。
Feb 10, 2015



Jan 22, 2015

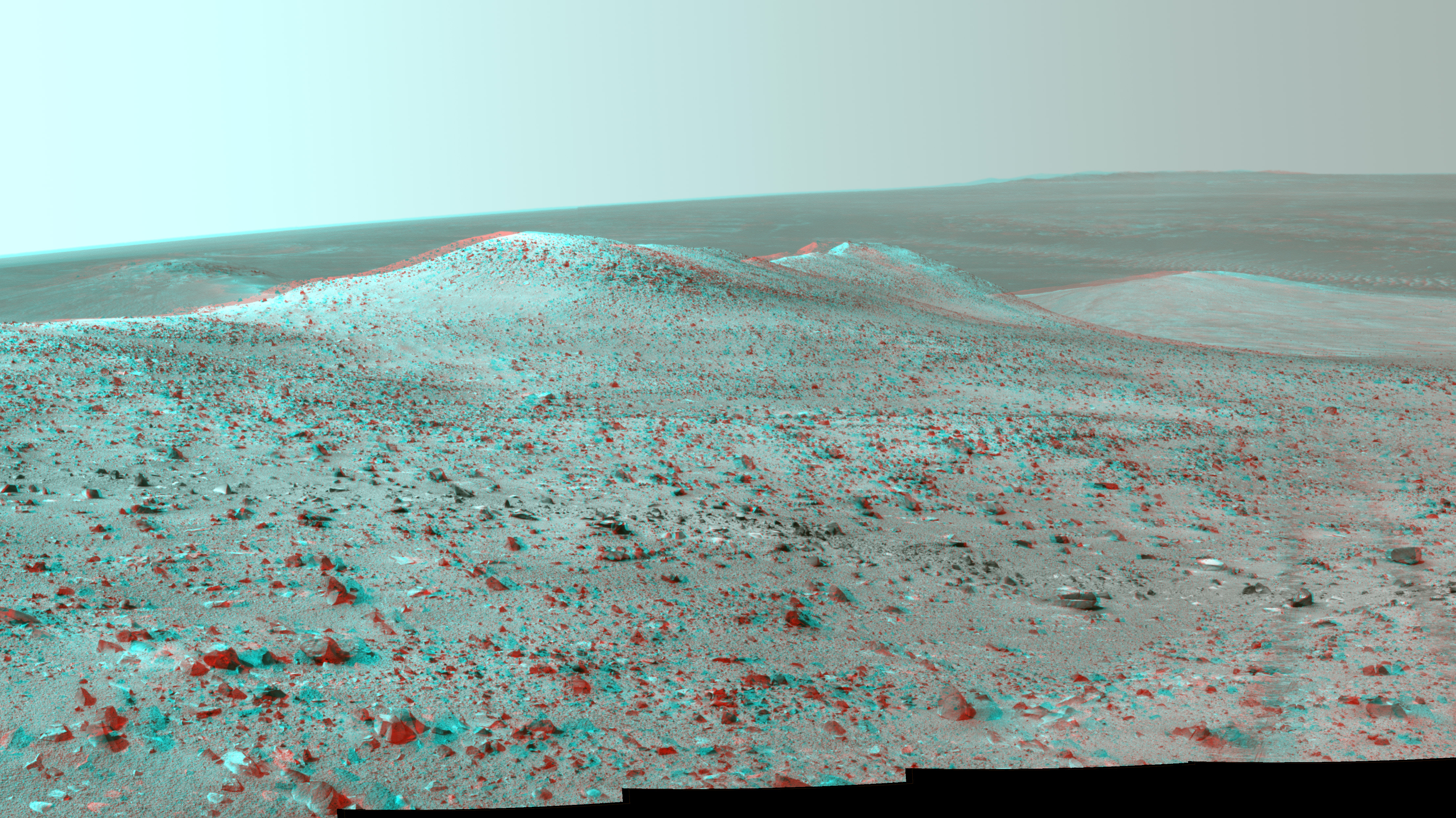
 NASAの火星探査ローバーオポチュニティは、ローバーが頂上までドライブした前日、エンデバークレータの西の縁の「トリビュレーション岬」の頂上のこの視界を記録した。このサイトは、2011年にエンデバーの縁を調査し始めて以来オポチュニティが到着した他のどの点よりも高く、クレータを囲む平原より約135メートル高い。この視界は、オポチュニティのナビゲーションカメラで火星日 3,893 日の2015年1月5日にとられた四つのイメージを結合している。頂上は、このイメージがとられた場所の約12メートル南西にある。
NASAの火星探査ローバーオポチュニティは、ローバーが頂上までドライブした前日、エンデバークレータの西の縁の「トリビュレーション岬」の頂上のこの視界を記録した。このサイトは、2011年にエンデバーの縁を調査し始めて以来オポチュニティが到着した他のどの点よりも高く、クレータを囲む平原より約135メートル高い。この視界は、オポチュニティのナビゲーションカメラで火星日 3,893 日の2015年1月5日にとられた四つのイメージを結合している。頂上は、このイメージがとられた場所の約12メートル南西にある。
Jan 08, 2015
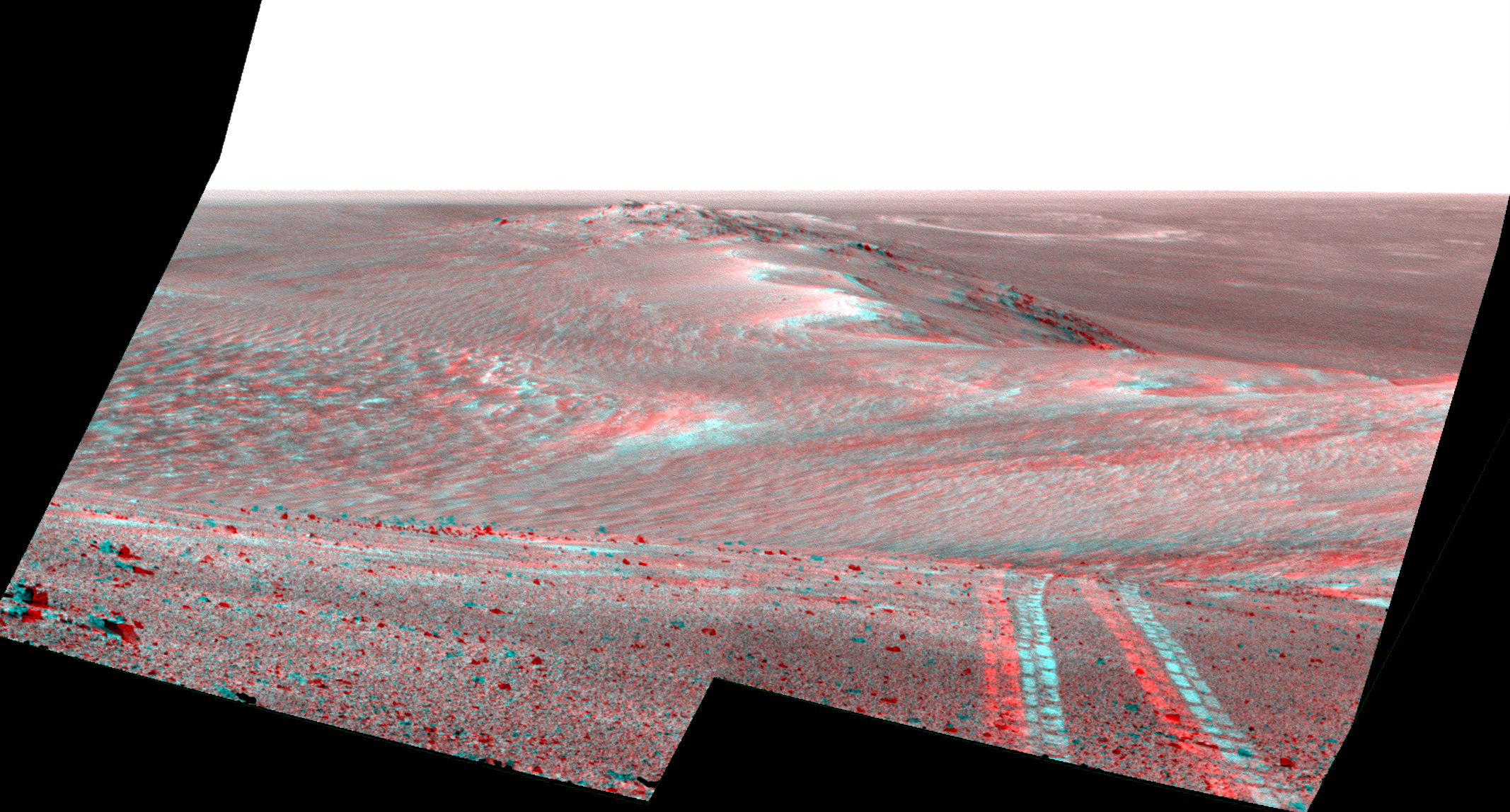
 NASAの火星探査ローバーオポチュニティは、2014年秋の間、科学的な関心の目標を調査するために停止しながら、エンデバークレータの西の縁で南に向かって横断を続けている。この視界は、火星日 3,854 日目の2014年11月26日に、オポチュニティの前部危険回避カメラからとられた。このカメラはローバーの低部に取り付けられ広角レンズを持っている。この場面には、左上に、「測定器展開装置(instrument deployment device)」と呼ばれるオポチュニティのロボットアームを含んでいる。ローバーの前の地上に露出する青白い基盤の部分はアームの届く範囲内にある。調査者達は、基盤の一部の「Calera」と呼ばれるターゲットを調べるためにアームの装置を使った。この場面の中には、火星日 3846 日(2014年11月18日)の 9.9 メートルのドライブからこの場所に戻った轍が見える。
NASAの火星探査ローバーオポチュニティは、2014年秋の間、科学的な関心の目標を調査するために停止しながら、エンデバークレータの西の縁で南に向かって横断を続けている。この視界は、火星日 3,854 日目の2014年11月26日に、オポチュニティの前部危険回避カメラからとられた。このカメラはローバーの低部に取り付けられ広角レンズを持っている。この場面には、左上に、「測定器展開装置(instrument deployment device)」と呼ばれるオポチュニティのロボットアームを含んでいる。ローバーの前の地上に露出する青白い基盤の部分はアームの届く範囲内にある。調査者達は、基盤の一部の「Calera」と呼ばれるターゲットを調べるためにアームの装置を使った。この場面の中には、火星日 3846 日(2014年11月18日)の 9.9 メートルのドライブからこの場所に戻った轍が見える。
Dec 11, 2014
 「ラストチャンス(Last Chance)」と呼ばれるこのターゲットの岩のクローズアップの視界は、NASAの火星探査ローバーオポチュニティのアームの先端の顕微鏡画像装置によって、オポチュニティの火星での活動の、火星日付39日目の、地球日2004年3月3日にとられた。この視界でカバーされたエリアは幅約5センチメートルである。このイメージに明らかな埋められた小さな球は、研究者達にマフィンのベリーを思い起こさせる、「ブルーベリー」と名付けられた。この岩のこれらの鉱物の凝固やその他の模様は、オポチュニティの着陸地点、メリディアニ・プラナム領域の、古代の湿った環境状況についての過去の証拠を提供した。
「ラストチャンス(Last Chance)」と呼ばれるこのターゲットの岩のクローズアップの視界は、NASAの火星探査ローバーオポチュニティのアームの先端の顕微鏡画像装置によって、オポチュニティの火星での活動の、火星日付39日目の、地球日2004年3月3日にとられた。この視界でカバーされたエリアは幅約5センチメートルである。このイメージに明らかな埋められた小さな球は、研究者達にマフィンのベリーを思い起こさせる、「ブルーベリー」と名付けられた。この岩のこれらの鉱物の凝固やその他の模様は、オポチュニティの着陸地点、メリディアニ・プラナム領域の、古代の湿った環境状況についての過去の証拠を提供した。
Nov 18, 2014
 調査者達は、彗星 C/2013 A1 サイディングスプリングが火星の近くを通過した時のこの10秒の露出の視界を捕えるために、NASAの火星探査ローバーオポチュニティのパノラマカメラ(Pancam)を使った。このイメージは、彗星の核が火星の最も近くに接近する約2時間半前にとられた。火星の夜明け前の空はまだ比較的暗かった。最接近時には、朝の空は、彗星の観測のためには明る過ぎた。この彗星、いくつかの近くの星、カメラの光検知器を打つ宇宙線の若干の影響にはラベルがつけられている。このイメージは検知器への影響の除去と薄明りのために処理を加えられた。この露出の間、火星の自転から 2.5 ピクセルになった。オポチュニティの一週前の空と比較して、10月19日のオポチュニティの西の火星のダストの嵐が可視性を多少妨げた。
調査者達は、彗星 C/2013 A1 サイディングスプリングが火星の近くを通過した時のこの10秒の露出の視界を捕えるために、NASAの火星探査ローバーオポチュニティのパノラマカメラ(Pancam)を使った。このイメージは、彗星の核が火星の最も近くに接近する約2時間半前にとられた。火星の夜明け前の空はまだ比較的暗かった。最接近時には、朝の空は、彗星の観測のためには明る過ぎた。この彗星、いくつかの近くの星、カメラの光検知器を打つ宇宙線の若干の影響にはラベルがつけられている。このイメージは検知器への影響の除去と薄明りのために処理を加えられた。この露出の間、火星の自転から 2.5 ピクセルになった。オポチュニティの一週前の空と比較して、10月19日のオポチュニティの西の火星のダストの嵐が可視性を多少妨げた。
 このイメージは50秒の露出からである。
このイメージは50秒の露出からである。
 この二つのイメージの明滅は、NASAの火星探査ローバーオポチュニティのパノラマカメラ(Pancam)からの、二つの露出時間の比較を示している。
この二つのイメージの明滅は、NASAの火星探査ローバーオポチュニティのパノラマカメラ(Pancam)からの、二つの露出時間の比較を示している。
Oct 20, 2014
 NASAの火星探査ローバー・オポチュニティからのこの眺望は、右に見えるローバーの轍とともに北に向かった視界の一部として、左手前から中央へ「ウドイワク尾根(Wdowiak Ridge)」を示している。オポチュニティのパノラマカメラ(Pancam)は、火星日 3,786 日の2014年9月17日にこの合成のための構成要素イメージを記録した。この尾根は、縁の主な頂上線の西約180メートルほどの、エンデバー・クレータの西の縁に立っている。この非公式な名前はオポチュニティ科学チームメンバーのトーマス J. ウドイワク(Thomas J. Wdowiak;1939-2013)に捧げられた。このパノラマは左の北北西から右の東北東まで約70度にわたっている。ウドイワク尾根は麓から頂上まで約12メートルの急な斜面で立っている。それは長さ約150メートルに伸びている。スケールとしてオポチュニティの平行する轍の間の距離は約1メートルである。ウドイワク尾根は、ローバーの火星日 3,751 日の位置近くの北東の終端からローバーの火星日 3,789 日の位置近くのオデッセイクレータまで、上からのマップ で見ることができる。イメージのこのバージョンは、753 ナノメートル(近赤外線)、535 ナノメートル(緑)、432 ナノメートル(紫)のパノラマカメラの三つのカラー・フィルタを通してとられたおよその真の色で表されている。
NASAの火星探査ローバー・オポチュニティからのこの眺望は、右に見えるローバーの轍とともに北に向かった視界の一部として、左手前から中央へ「ウドイワク尾根(Wdowiak Ridge)」を示している。オポチュニティのパノラマカメラ(Pancam)は、火星日 3,786 日の2014年9月17日にこの合成のための構成要素イメージを記録した。この尾根は、縁の主な頂上線の西約180メートルほどの、エンデバー・クレータの西の縁に立っている。この非公式な名前はオポチュニティ科学チームメンバーのトーマス J. ウドイワク(Thomas J. Wdowiak;1939-2013)に捧げられた。このパノラマは左の北北西から右の東北東まで約70度にわたっている。ウドイワク尾根は麓から頂上まで約12メートルの急な斜面で立っている。それは長さ約150メートルに伸びている。スケールとしてオポチュニティの平行する轍の間の距離は約1メートルである。ウドイワク尾根は、ローバーの火星日 3,751 日の位置近くの北東の終端からローバーの火星日 3,789 日の位置近くのオデッセイクレータまで、上からのマップ で見ることができる。イメージのこのバージョンは、753 ナノメートル(近赤外線)、535 ナノメートル(緑)、432 ナノメートル(紫)のパノラマカメラの三つのカラー・フィルタを通してとられたおよその真の色で表されている。
 このイメージは、753 ナノメートル(近赤外線)、535 ナノメートル(緑)、432 ナノメートル(紫)のパノラマカメラの三つのカラー・フィルタを通してとられた疑似カラーバージョンである。
このイメージは、753 ナノメートル(近赤外線)、535 ナノメートル(緑)、432 ナノメートル(紫)のパノラマカメラの三つのカラー・フィルタを通してとられた疑似カラーバージョンである。
 このイメージは、753 ナノメートル(近赤外線)、535 ナノメートル(緑)、432 ナノメートル(紫)のパノラマカメラの三つのカラー・フィルタを通してとられたステレオバージョンである。
このイメージは、753 ナノメートル(近赤外線)、535 ナノメートル(緑)、432 ナノメートル(紫)のパノラマカメラの三つのカラー・フィルタを通してとられたステレオバージョンである。
Oct 16, 2014
| 自 然 色 |
|---|
 |
| 疑 似 カ ラ ー |
|---|
 |
| 3 次 元 |
|---|
 |
Sept 10, 2014
大判サイズはイメージをクリックしてNASAのサイトから。
Aug 29, 2014
大判サイズはイメージをクリックしてNASAのサイトから。 TOP
TOP
 PREV
PREV