 |
|
 |
 |
 |
 |
 |
 この図は、チームが、NASAのインジェニュイティ火星ヘリコプターの特定のテスト飛行での、達成を期待している一般的な活動を示している。ヘリコプターのテスト飛行計画は地球日31日(火星日30日)になるだろう。
この図は、チームが、NASAのインジェニュイティ火星ヘリコプターの特定のテスト飛行での、達成を期待している一般的な活動を示している。ヘリコプターのテスト飛行計画は地球日31日(火星日30日)になるだろう。
Mar 23. 2021
 この短いアニメーションは、ローバーのサンプル貯蔵システムの一部分の開閉するドアを示している。これらのイメージのセットは3月13日と15日(火星日22日と24日)にとられ、ローバーのサンプル貯蔵システムの一部の開閉するドアを示している。パーサービアランスのサンプル貯蔵システムは、将来のミッションによって回収される、チューブに貯められ封入される、岩や表土のサンプルを集めるために働く、火星の表面の三つのロボット構成要素から成っている。これらのイメージはワトソンカメラによって撮られた。
この短いアニメーションは、ローバーのサンプル貯蔵システムの一部分の開閉するドアを示している。これらのイメージのセットは3月13日と15日(火星日22日と24日)にとられ、ローバーのサンプル貯蔵システムの一部の開閉するドアを示している。パーサービアランスのサンプル貯蔵システムは、将来のミッションによって回収される、チューブに貯められ封入される、岩や表土のサンプルを集めるために働く、火星の表面の三つのロボット構成要素から成っている。これらのイメージはワトソンカメラによって撮られた。
Mar 23. 2021
 |
 |
 |
 |
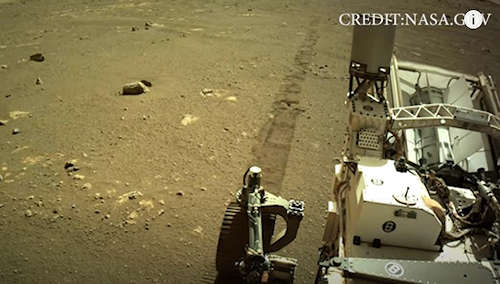
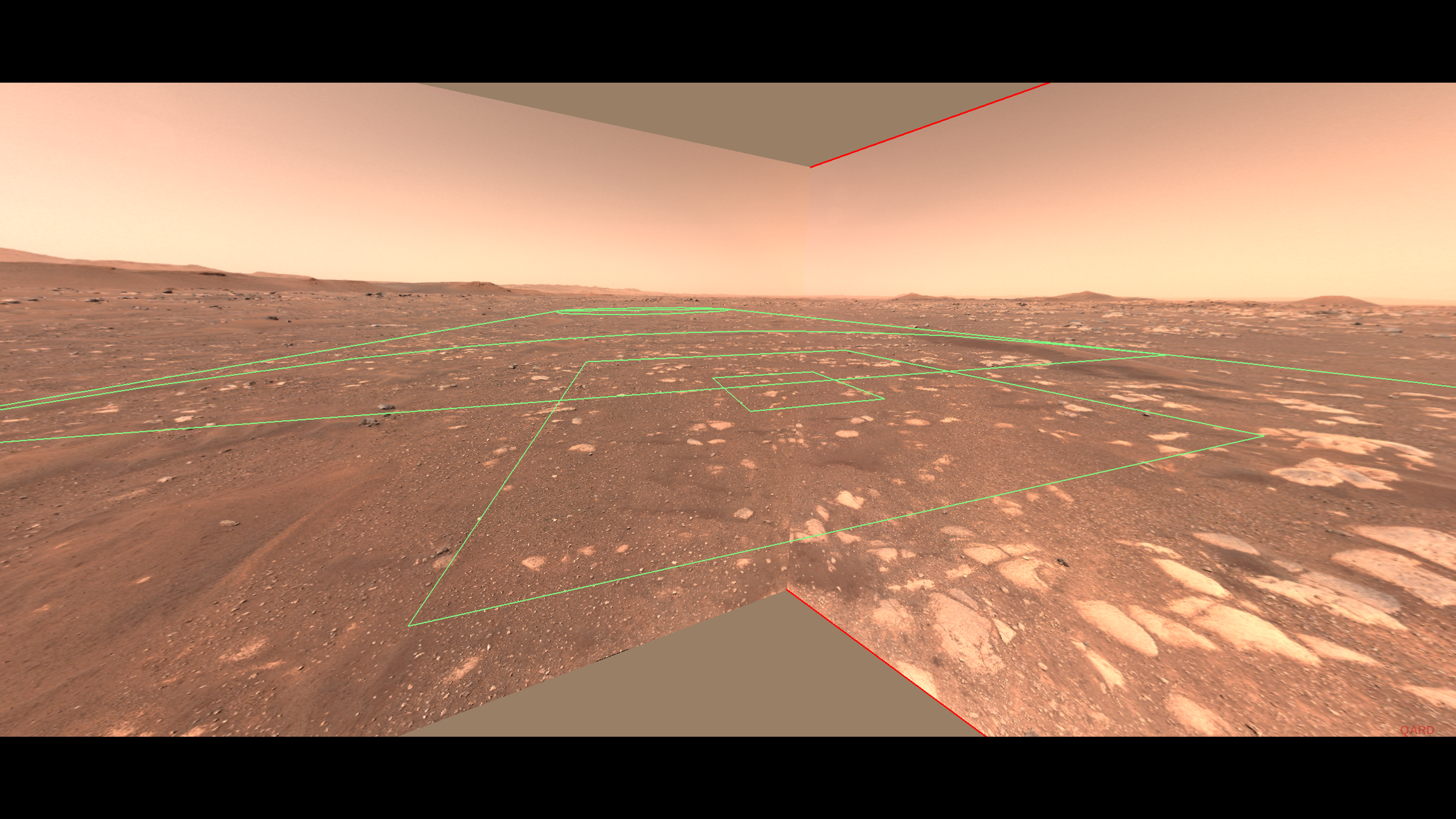 このイメージは、NASAのマーズ2020パーサービアランスローバーの視点から、NASAのインジェニュイティヘリコプターのフライト地帯を示している。この飛行地帯はヘリコプターが飛ぼうとするエリアである。このイメージは、ローバーがヘリコプターを配備するだろう最も内側の緑のボックス---ヘリポートの位置、ヘリコプターが常に飛び立ちまた戻る次の大きな緑のボックス---離着場、最も外側の緑の線---フライト地帯を示している。このイメージは、パーサービアランスローバーのナビゲーションカメラでとられた。
このイメージは、NASAのマーズ2020パーサービアランスローバーの視点から、NASAのインジェニュイティヘリコプターのフライト地帯を示している。この飛行地帯はヘリコプターが飛ぼうとするエリアである。このイメージは、ローバーがヘリコプターを配備するだろう最も内側の緑のボックス---ヘリポートの位置、ヘリコプターが常に飛び立ちまた戻る次の大きな緑のボックス---離着場、最も外側の緑の線---フライト地帯を示している。このイメージは、パーサービアランスローバーのナビゲーションカメラでとられた。
Mar 23. 2021
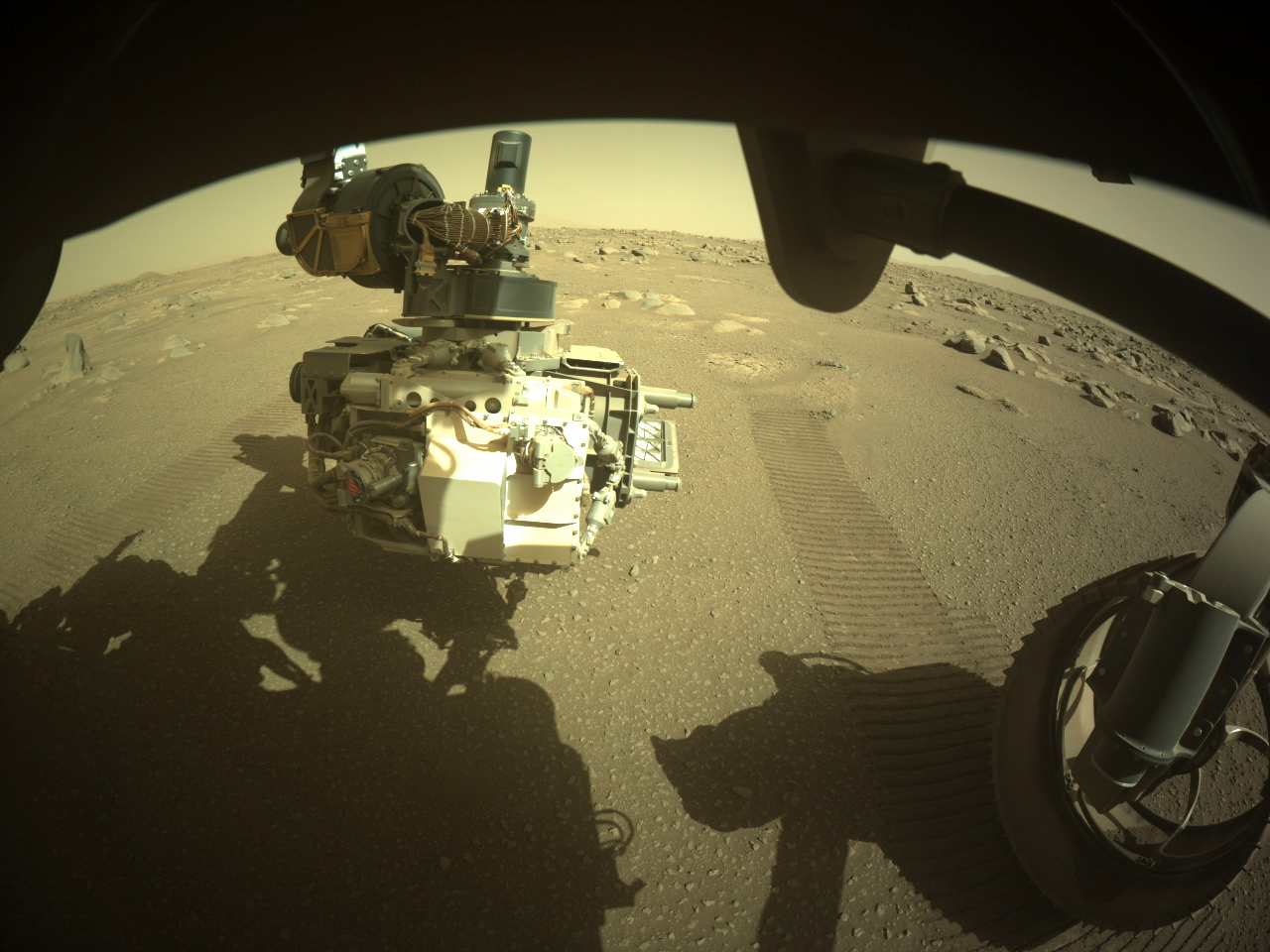
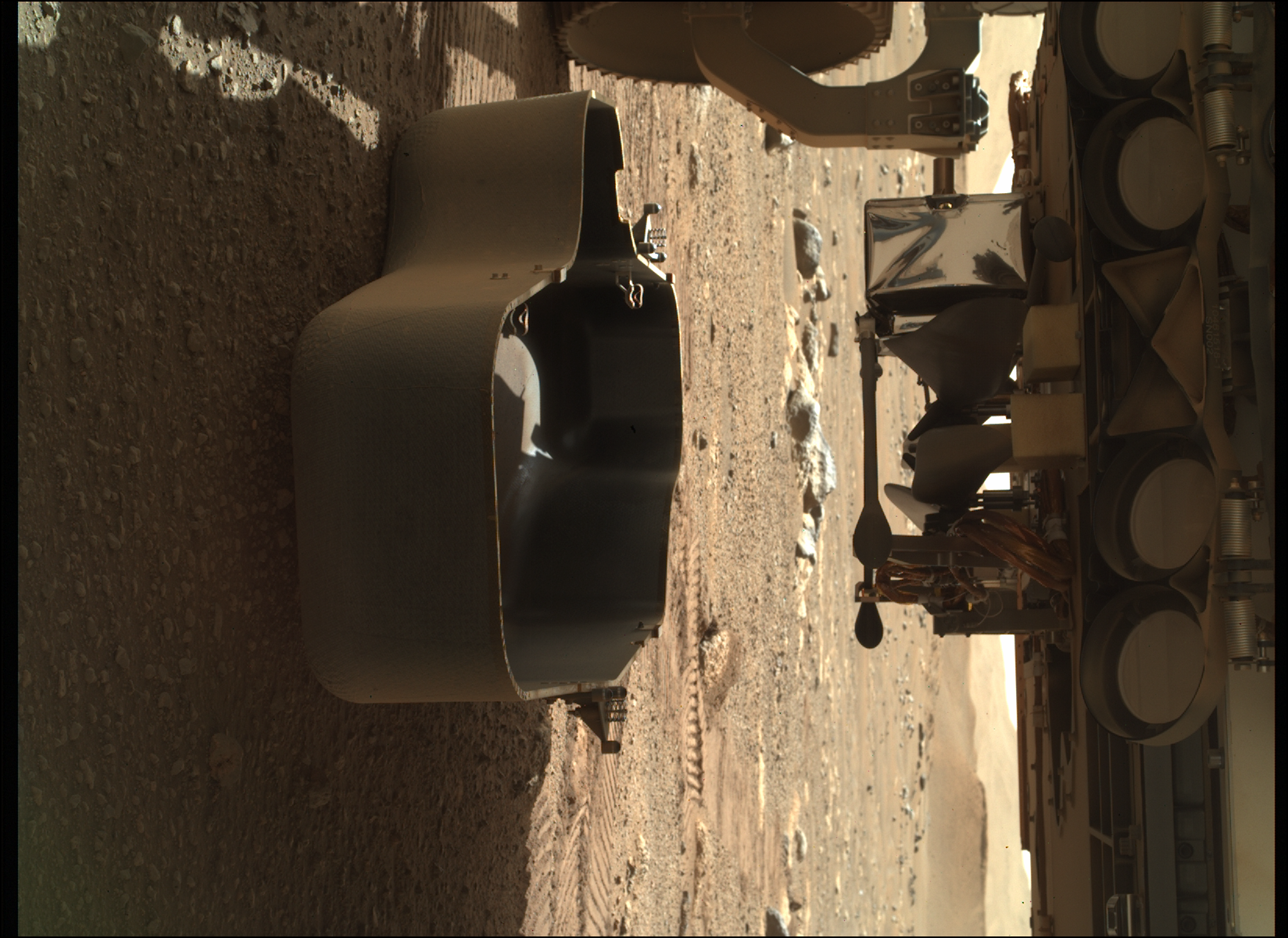
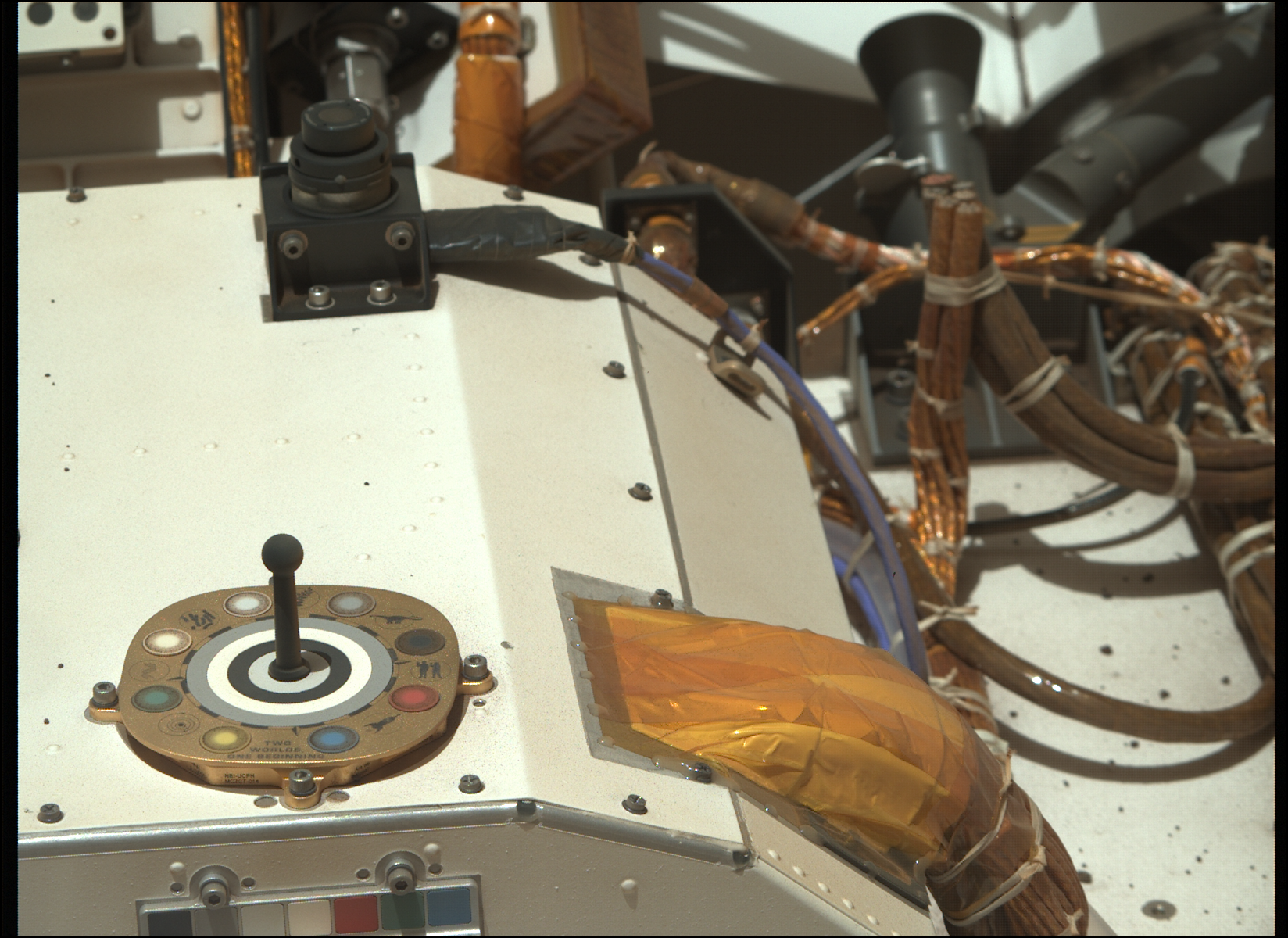
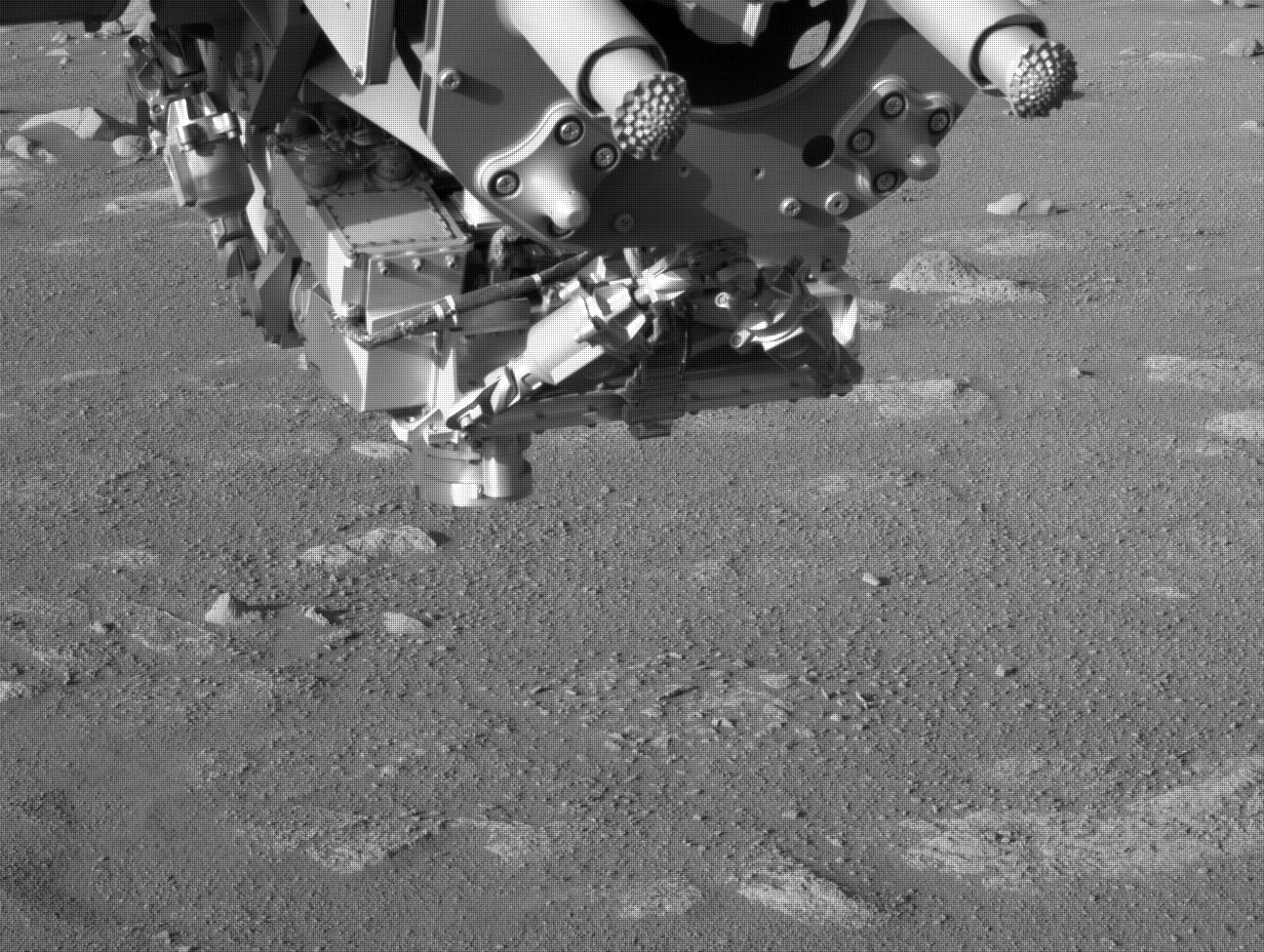
 NASAのパーサービアランスローバーの下部の保護カバー破片シールドが、21日、火星日30日に解放された。
この破片シールドは、着陸の間、インジェニュイティヘリコプターを保護してきた。
その解放によって、ヘリコプターをローバーの腹部から降ろすことが可能になる。
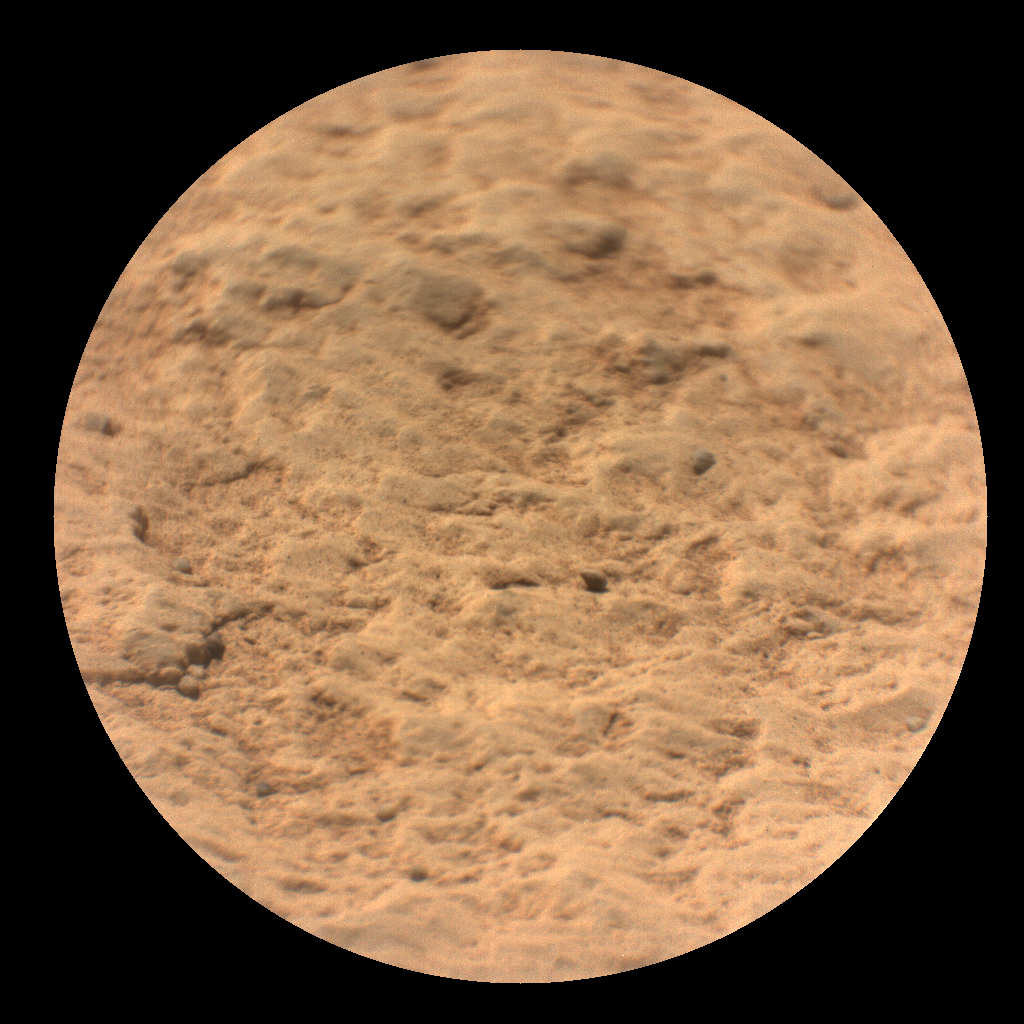
このイメージは、ローバーの長いロボットアームの終端にある、 SHERLOC 装置(Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals)の、ワトソン・カメラ(WATSON:Wide Angle Topographic Sensor for Operations and eNgineering)によってとられた。
NASAのパーサービアランスローバーの下部の保護カバー破片シールドが、21日、火星日30日に解放された。
この破片シールドは、着陸の間、インジェニュイティヘリコプターを保護してきた。
その解放によって、ヘリコプターをローバーの腹部から降ろすことが可能になる。
このイメージは、ローバーの長いロボットアームの終端にある、 SHERLOC 装置(Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals)の、ワトソン・カメラ(WATSON:Wide Angle Topographic Sensor for Operations and eNgineering)によってとられた。
Mer 23. 2021
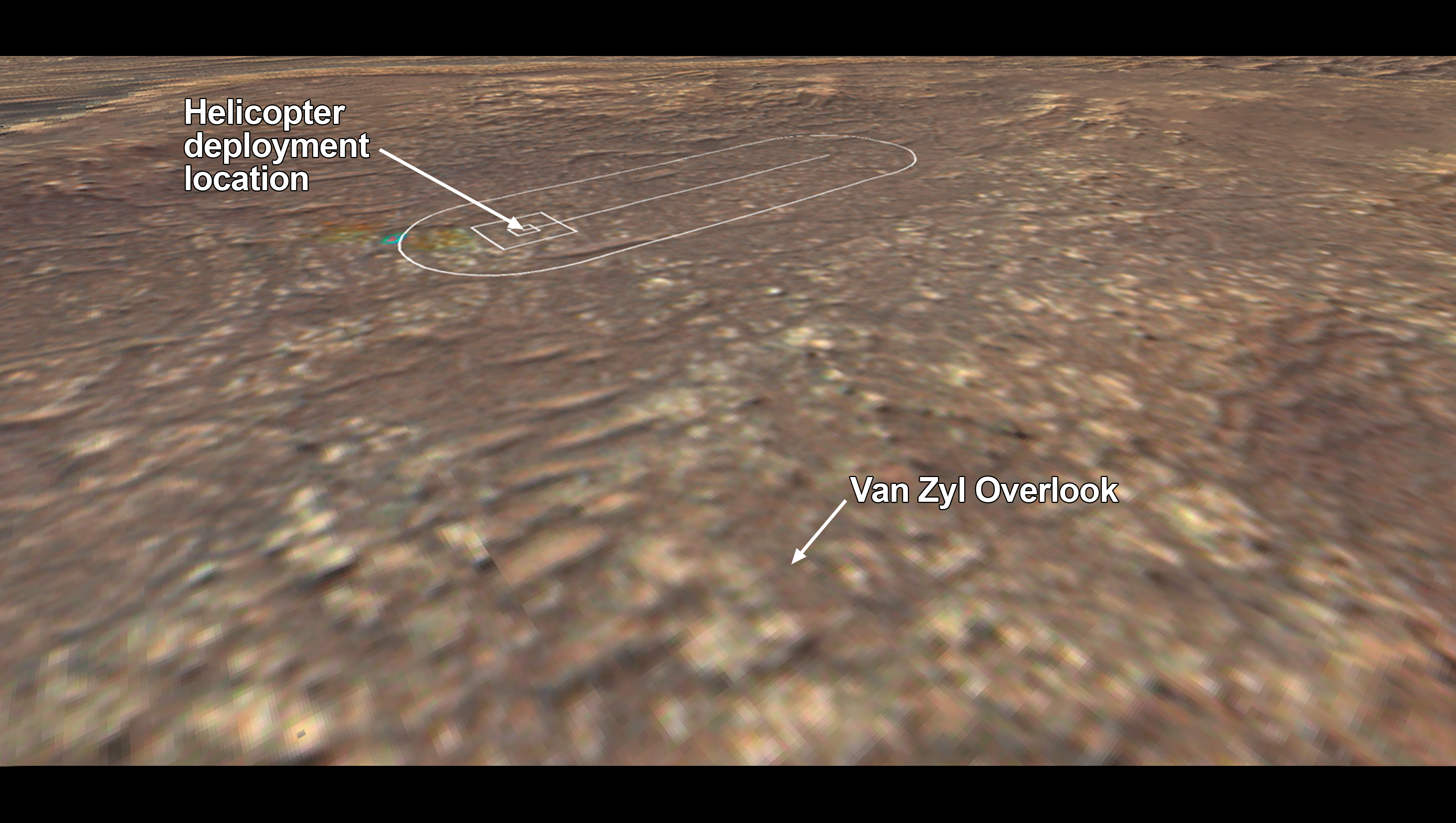 NASAのマーズ2020パーサービアランスローバーがインジェニュイティマーズヘリコプターの試みを観測するであろう場所、火星における制御された飛行は、 Jakob van Zyl に因んで、「Van Zyl Overlook」と呼ばれる。van Zyl は、南カリフォルニアのNASAのジェット推進研究所のチームの長年の同僚であり、良き指導者であり、リーダーであった。彼は、パーサービアランス打上後約1ヵ月の2020年8月に予期せずに他界した。(以下略)
NASAのマーズ2020パーサービアランスローバーがインジェニュイティマーズヘリコプターの試みを観測するであろう場所、火星における制御された飛行は、 Jakob van Zyl に因んで、「Van Zyl Overlook」と呼ばれる。van Zyl は、南カリフォルニアのNASAのジェット推進研究所のチームの長年の同僚であり、良き指導者であり、リーダーであった。彼は、パーサービアランス打上後約1ヵ月の2020年8月に予期せずに他界した。(以下略)
Mer 23. 2021
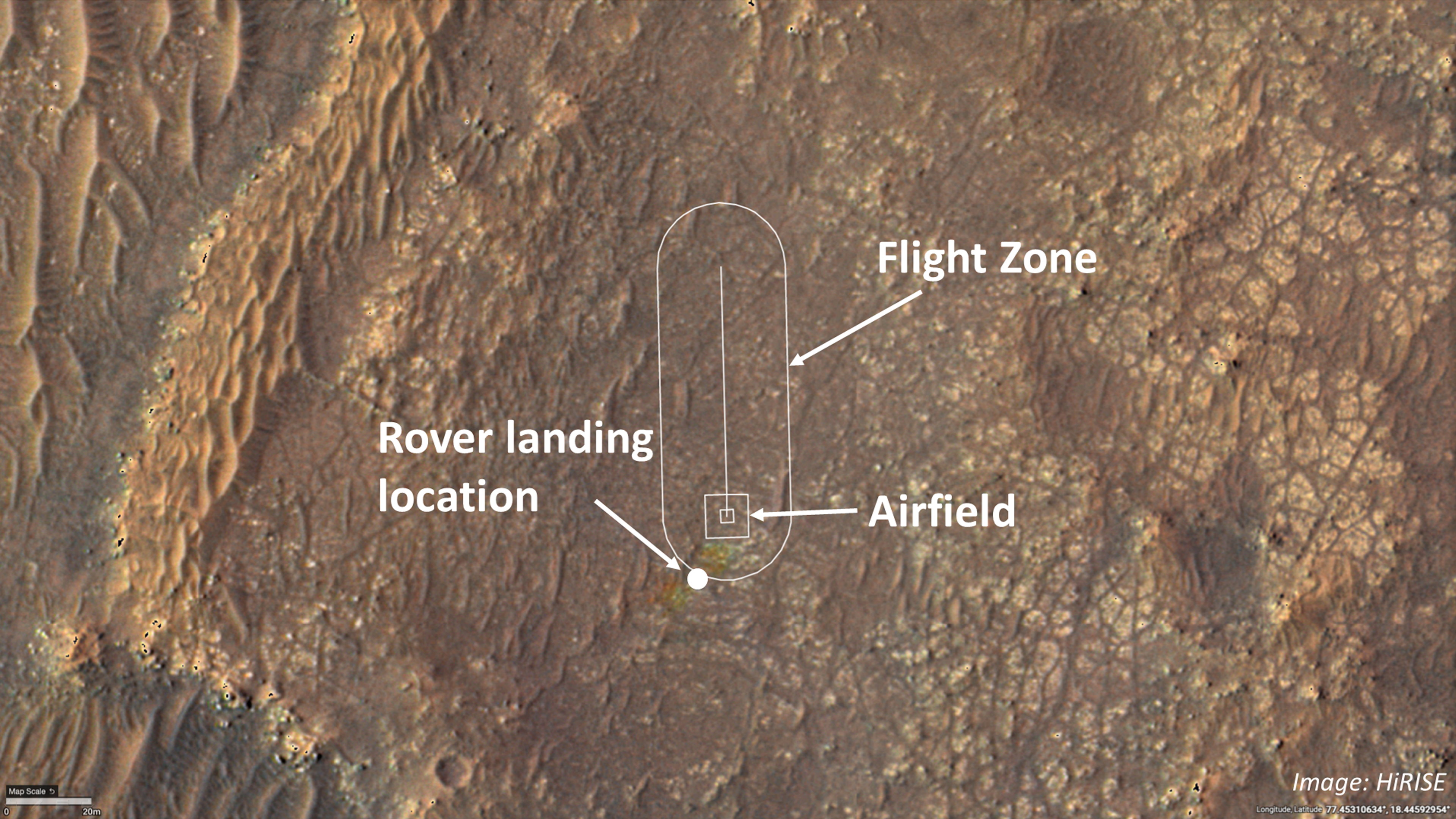 このイメージは、NASAのインジェニュイティマーズヘリコプターチームが試験飛行を試みる場所を示している。ヘリコプター技術者達は、ローバーの着陸地点の、 離着陸の場所、飛行地帯の場所を加えた。着陸前後のカラーイメージが合成されたために、いくつかの着陸場所の近くに小さな虹色の歪が見える。
このイメージは、NASAのインジェニュイティマーズヘリコプターチームが試験飛行を試みる場所を示している。ヘリコプター技術者達は、ローバーの着陸地点の、 離着陸の場所、飛行地帯の場所を加えた。着陸前後のカラーイメージが合成されたために、いくつかの着陸場所の近くに小さな虹色の歪が見える。
Mer 23. 2021
|
 |
 |
 |
Mar 19. 2021
 |
 |

 |
 |
 |
 |
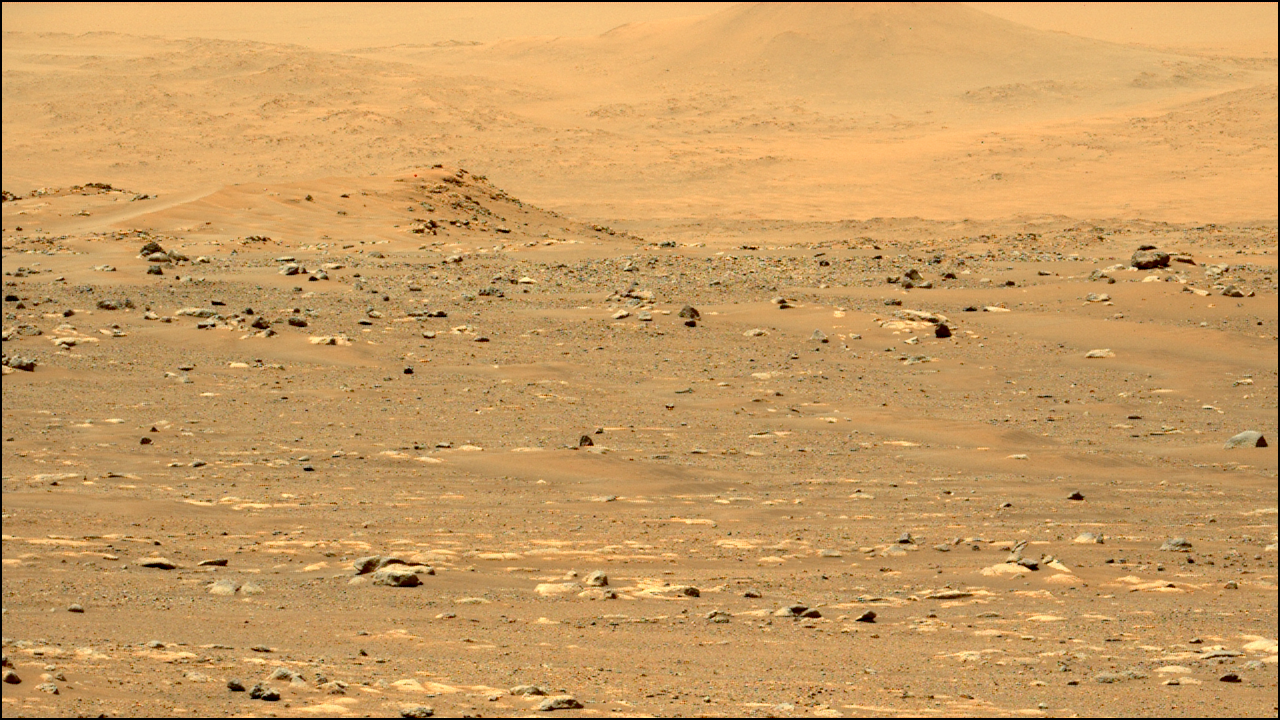
 この新しいパノラマは、マストカメラ右目110ミリ望遠ズームレンズによって撮影された。この合成は79の個別のイメージを編集した、火星で撮影されたカメラの最初の高解像度パノラマである。主なパノラマ画像は火星日4日の午後からである。ペンギン岩の位置は約150メートル、ミラー岩は約200メートルにあると思われる。
この新しいパノラマは、マストカメラ右目110ミリ望遠ズームレンズによって撮影された。この合成は79の個別のイメージを編集した、火星で撮影されたカメラの最初の高解像度パノラマである。主なパノラマ画像は火星日4日の午後からである。ペンギン岩の位置は約150メートル、ミラー岩は約200メートルにあると思われる。
Mar 05. 2021
 |
 |
 |
 |
 |
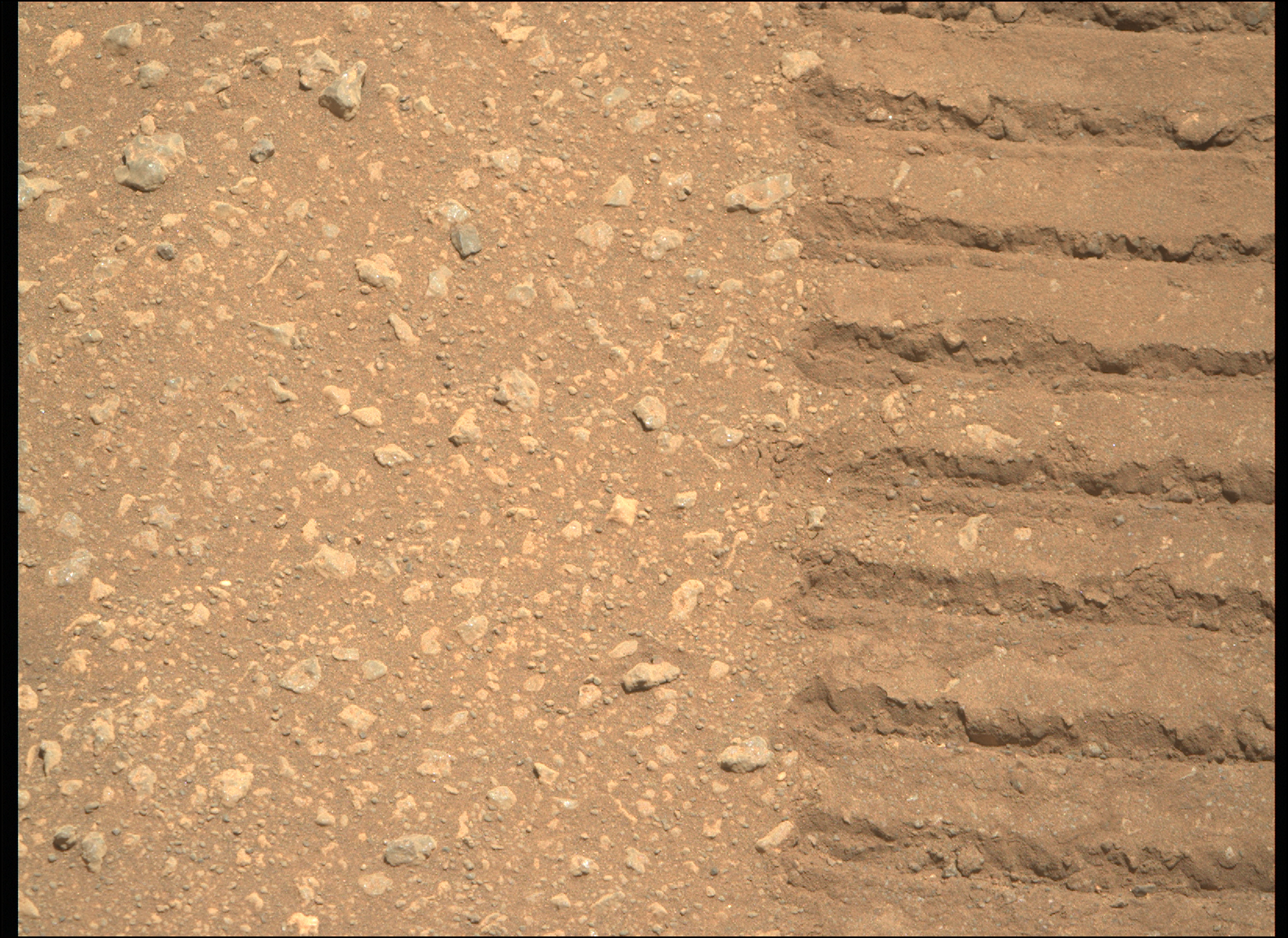
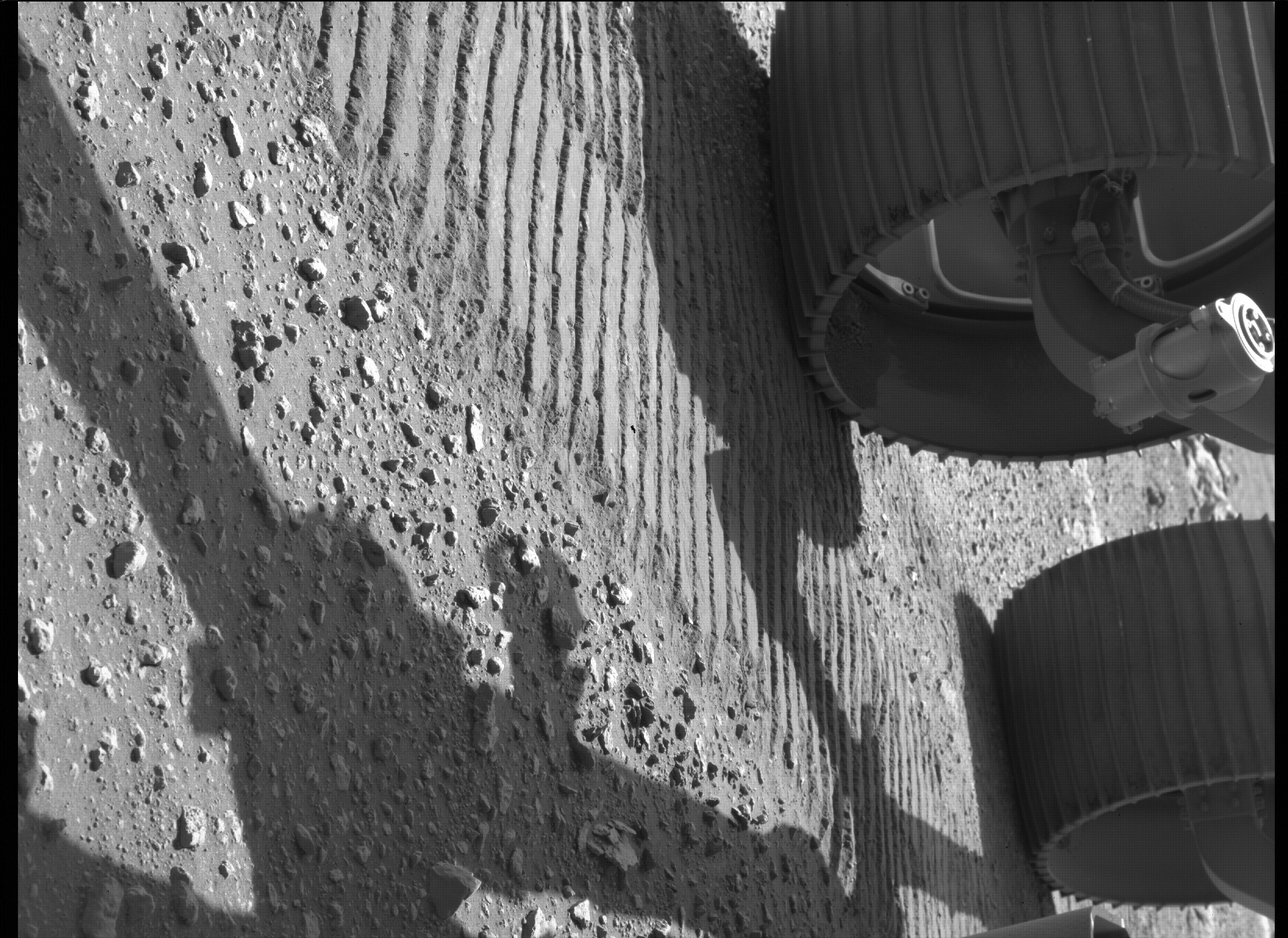
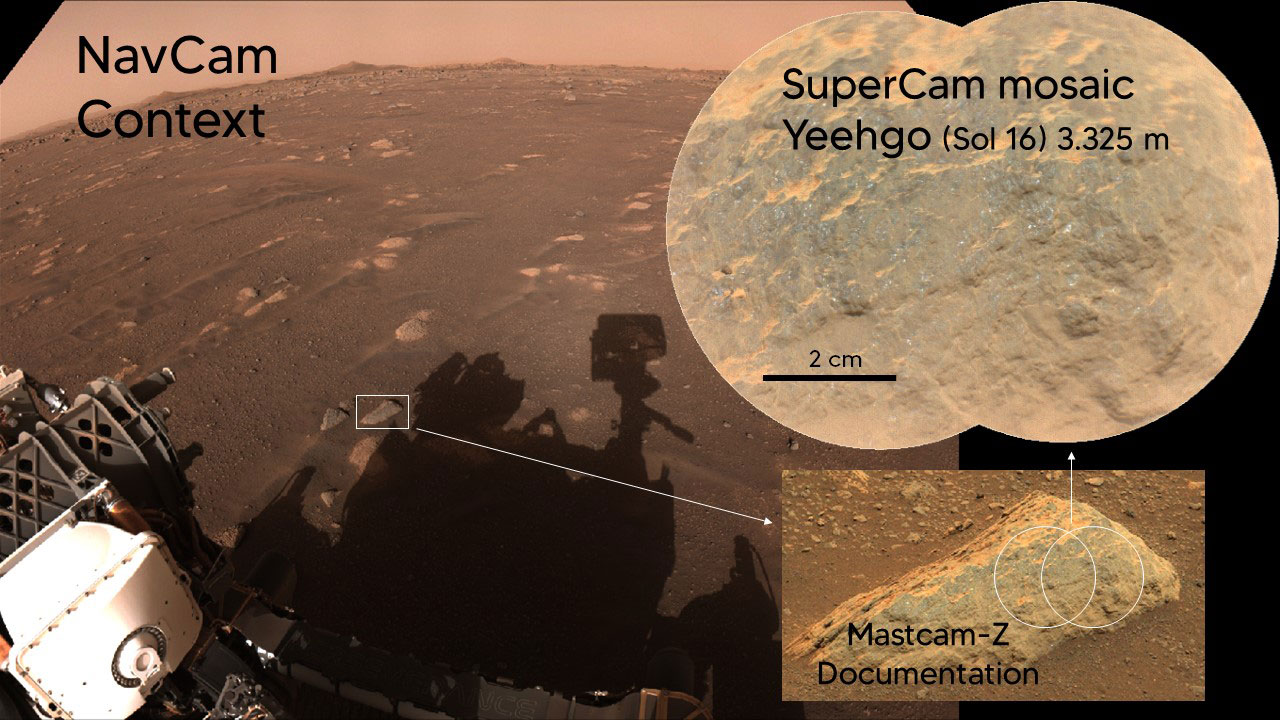
 ローバーは、ナビゲーションカメラ(Navcam)左を使ってこのイメージをとった。このカメラはローバーのマストの高い位置にあり走行を誘導する。このイメージは2021年3月7日(sol 16)にとられた。
ローバーは、ナビゲーションカメラ(Navcam)左を使ってこのイメージをとった。このカメラはローバーのマストの高い位置にあり走行を誘導する。このイメージは2021年3月7日(sol 16)にとられた。
Mar 7. 2021
 |
 |
 技術実証実験であるインジェニュイティは、他の惑星で動力を与えられた制御飛行を試みる初めての航空機である。インジェニュイティは、2021年2月18日に火星に到着し、NASAのマーズ2020ローバーの腹部に取付けられた。インジェニュイティは2021年春に初の飛行試験を試みる予定である。
技術実証実験であるインジェニュイティは、他の惑星で動力を与えられた制御飛行を試みる初めての航空機である。インジェニュイティは、2021年2月18日に火星に到着し、NASAのマーズ2020ローバーの腹部に取付けられた。インジェニュイティは2021年春に初の飛行試験を試みる予定である。
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 このアニメーションは、2021年3月5日、火星での最初のドライブ中に、ローバーのナビゲーションカメラによって撮影された。
このアニメーションは、2021年3月5日、火星での最初のドライブ中に、ローバーのナビゲーションカメラによって撮影された。
 |
 |
 |
 |
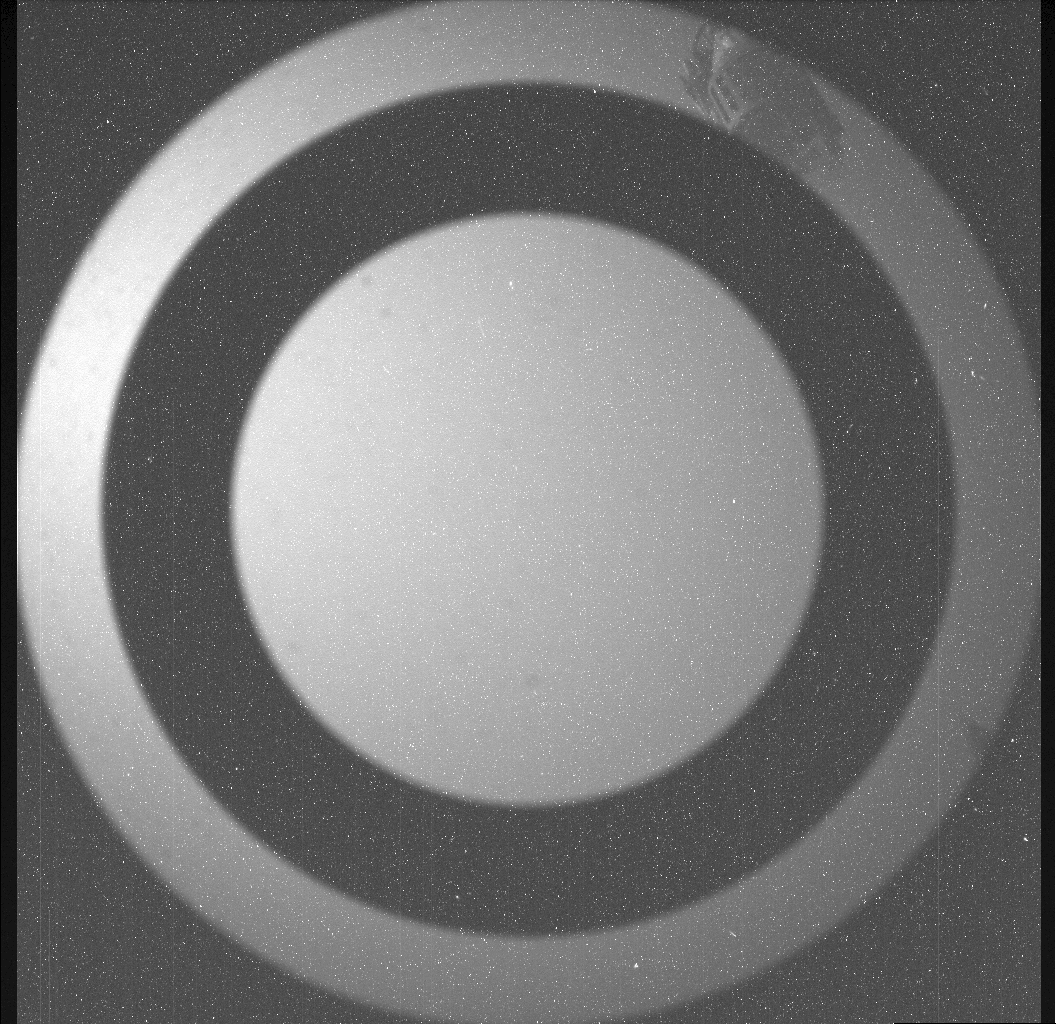
 このイメージは、NASAのパーサービアランスのスーパーカム装置からの“Maaz”と名付けられた岩の目標のクローズアップの視界を示している。それはスーパーカムの遠隔マイクロ画像装置(RMI)によってとられた。“Maaz”は、ナバホ族語で火星を意味する。スーパーカムデータの分析では、Maaz が玄武岩の組成を持っていることを示している。それは火成の岩か、水の環境で固まった火成の素材の微細な粒から成っている。このターゲットはローバーから 3.17 メートルにあり、この視界は直径6センチメートルである。
このイメージは、NASAのパーサービアランスのスーパーカム装置からの“Maaz”と名付けられた岩の目標のクローズアップの視界を示している。それはスーパーカムの遠隔マイクロ画像装置(RMI)によってとられた。“Maaz”は、ナバホ族語で火星を意味する。スーパーカムデータの分析では、Maaz が玄武岩の組成を持っていることを示している。それは火成の岩か、水の環境で固まった火成の素材の微細な粒から成っている。このターゲットはローバーから 3.17 メートルにあり、この視界は直径6センチメートルである。
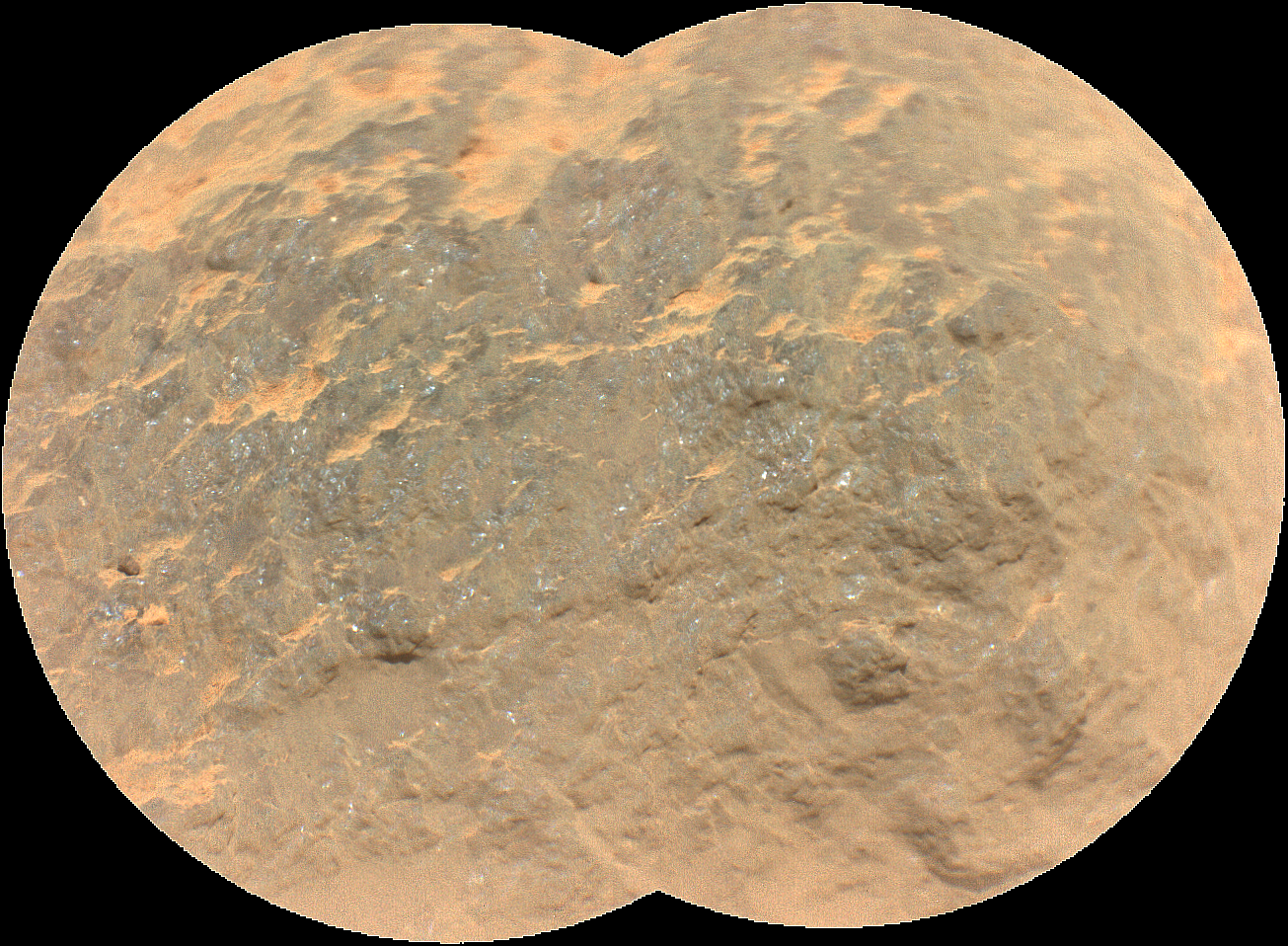 二つのイメージを結合したこの合成は、パーサービアランスローバーのスーパーカム装置からの「Yeehgo(または Yeigo、注:ナバホ族の言葉で勤勉を意味する)」と名付けられた岩の目標のクローズアップの視界を示している。この構成要素イメージは、火星日16日の3月7日に、スーパーカムの遠隔マイクロ画像装置(RMI)によってとられた。
この目標はローバーから 3.325 メートルにあり、合成の二つのイメージのそれぞれは、直径 6.2 センチメートルの視界フィールドを示している。
二つのイメージを結合したこの合成は、パーサービアランスローバーのスーパーカム装置からの「Yeehgo(または Yeigo、注:ナバホ族の言葉で勤勉を意味する)」と名付けられた岩の目標のクローズアップの視界を示している。この構成要素イメージは、火星日16日の3月7日に、スーパーカムの遠隔マイクロ画像装置(RMI)によってとられた。
この目標はローバーから 3.325 メートルにあり、合成の二つのイメージのそれぞれは、直径 6.2 センチメートルの視界フィールドを示している。
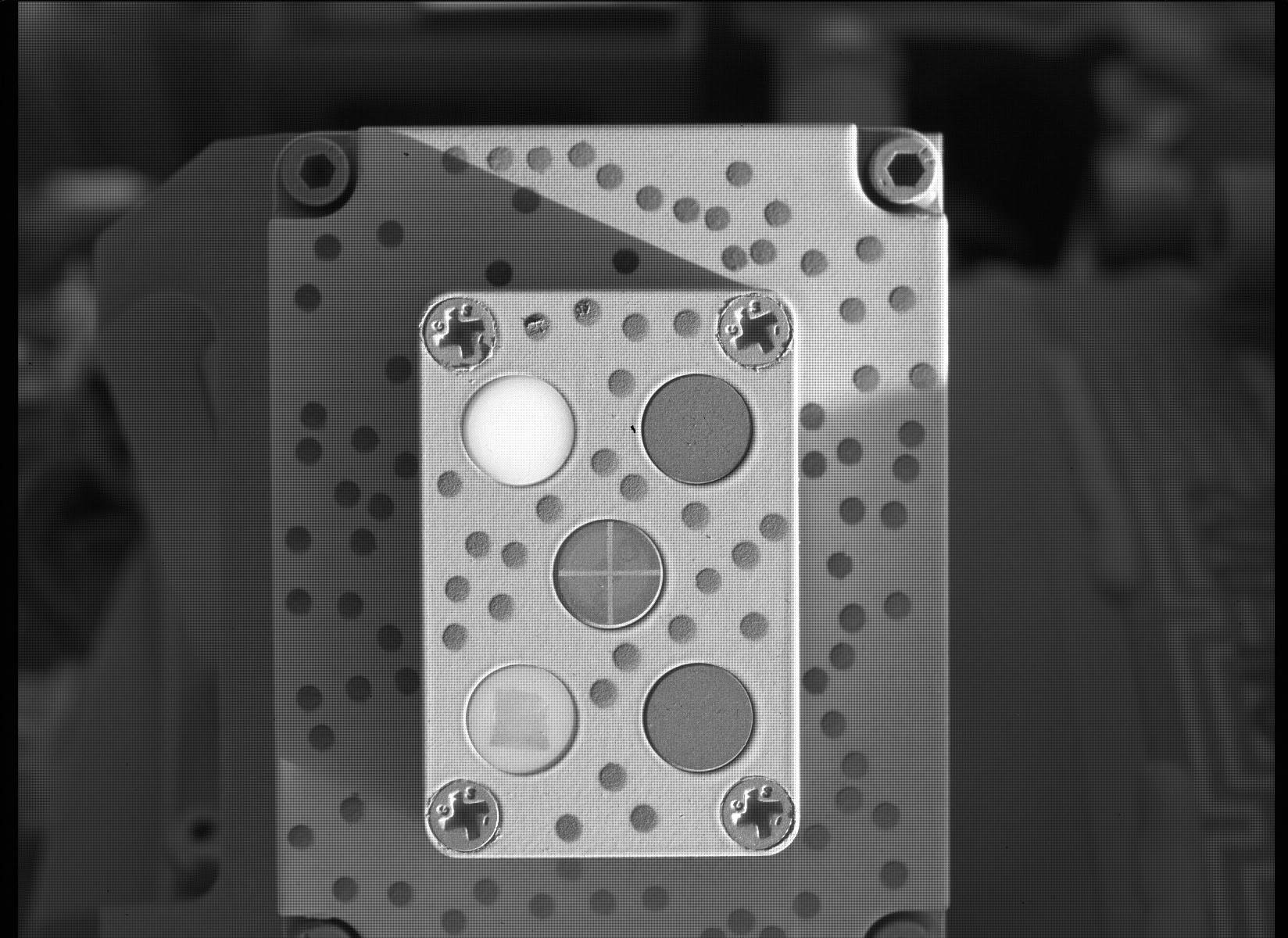
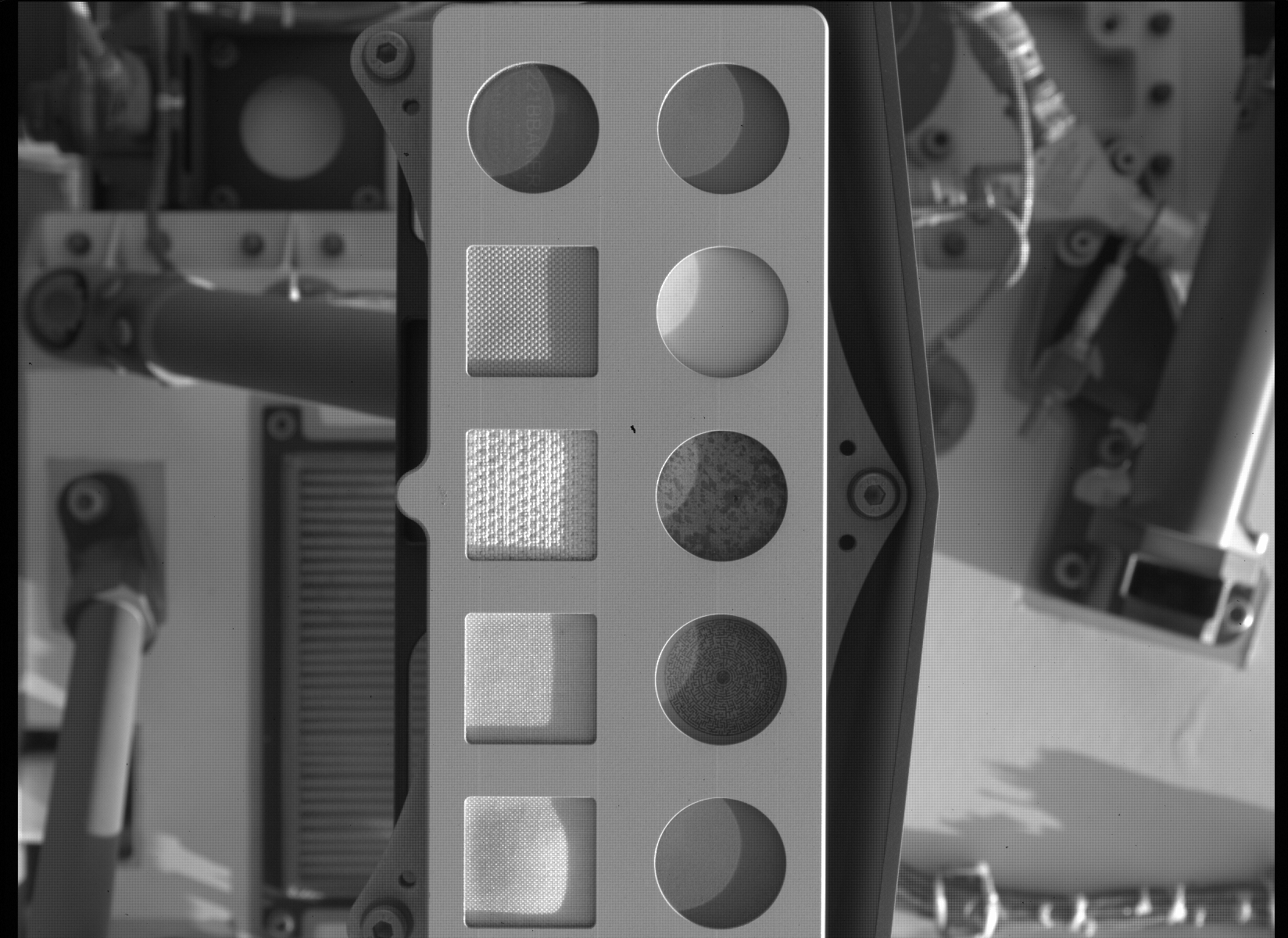
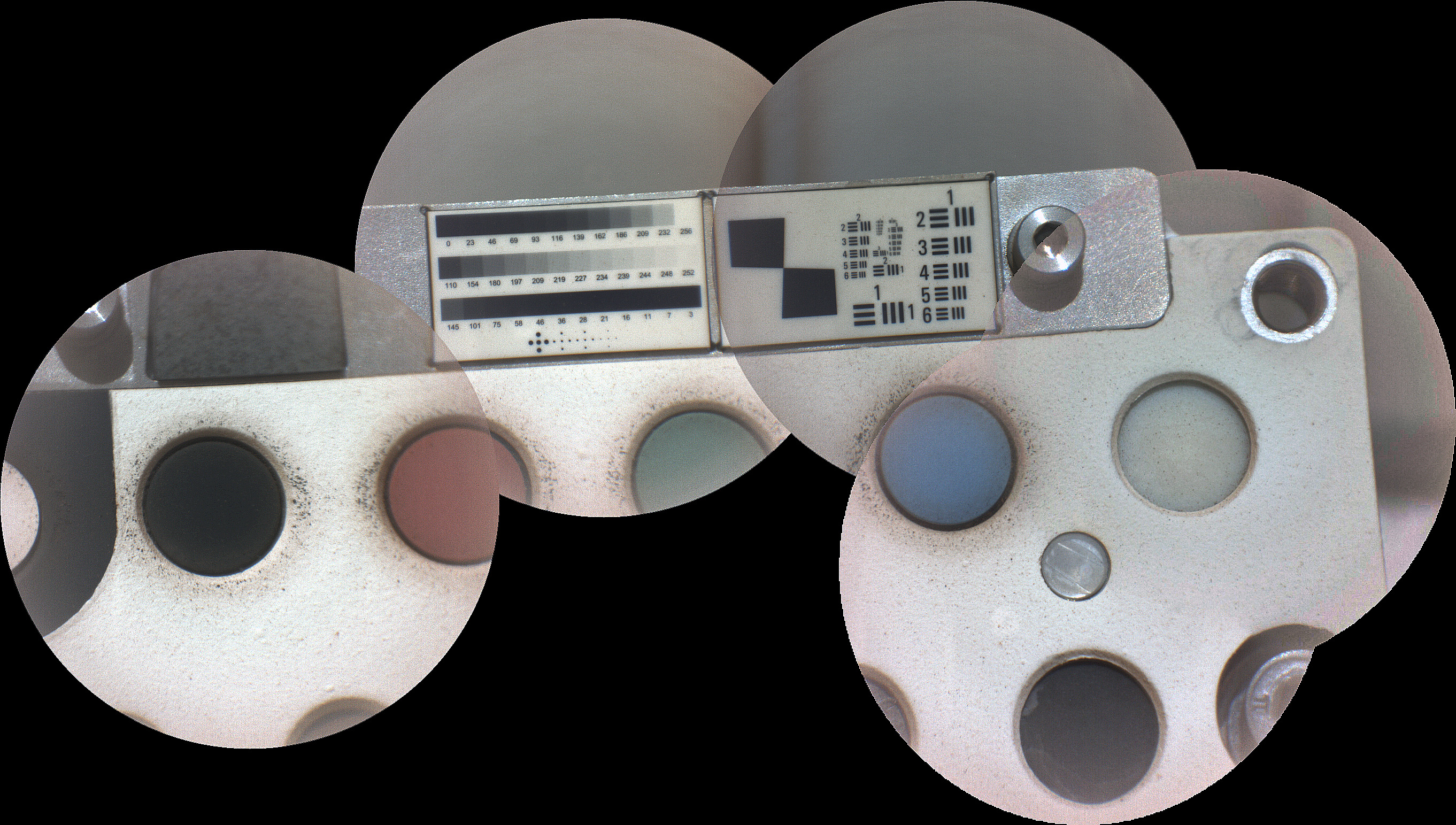 五つのイメージから成るこの合成は、火星でNASAパーサービアランスローバーのスーパーカム(SuperCam)装置の較正目標を示している。この構成要素イメージは、2021年3月1日、2日、4日(火星日11,12,13日)に、スーパーカムの遠隔マイクロ画像装置(RMI)によって撮られた。この較正目標には、 RMI の焦点を調整するための視覚構成要素と、この装置の4台の分光計の較正のための様々なサンプルを含んでいる。この遠隔マイクロ画像装置は、ローバーの後部のスーパーカム較正目標の、100ミクロンほどの小さなダストの粒を観測することができる。
五つのイメージから成るこの合成は、火星でNASAパーサービアランスローバーのスーパーカム(SuperCam)装置の較正目標を示している。この構成要素イメージは、2021年3月1日、2日、4日(火星日11,12,13日)に、スーパーカムの遠隔マイクロ画像装置(RMI)によって撮られた。この較正目標には、 RMI の焦点を調整するための視覚構成要素と、この装置の4台の分光計の較正のための様々なサンプルを含んでいる。この遠隔マイクロ画像装置は、ローバーの後部のスーパーカム較正目標の、100ミクロンほどの小さなダストの粒を観測することができる。
 |
 |
 |
 |
 TOP
TOP
 OVERVIEW
OVERVIEW
 PREV
NEXT
PREV
NEXT